

Pure rotation camera self-calibration method based on spherical projection model
A technology for rotating cameras and cameras, which can be used in image analysis, image data processing, instruments, etc., and can solve problems such as complex matrix numerical operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
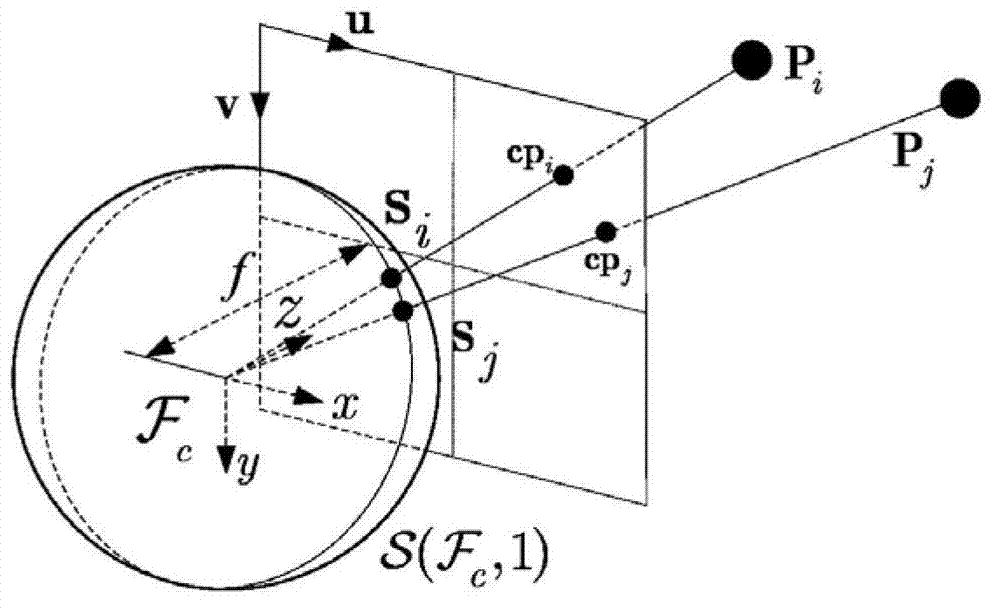
[0135] First, construct the spherical projection model of the pinhole camera
[0136] Define point P i , P j represent the i and j spatial points respectively. The abscissa axis and the ordinate axis of the pixel coordinate system are denoted by u and v respectively. by Indicates the camera coordinate system, where The origin of is at the optical center of the camera, The z-axis coincides with the optical axis of the camera, the x-axis direction is the same as the u-axis direction, and the y-axis direction is the same as the v-axis direction. f is the focal length of the camera, and the unit of f is meter; cp i , cp j represents the point P i , P j The corresponding image pixels are in down position. expressed by The unit virtual sphere whose origin is the center of the sphere; s i ,s j cp respectively i , cp j corresponding to The projection point on is called spherical projection point;
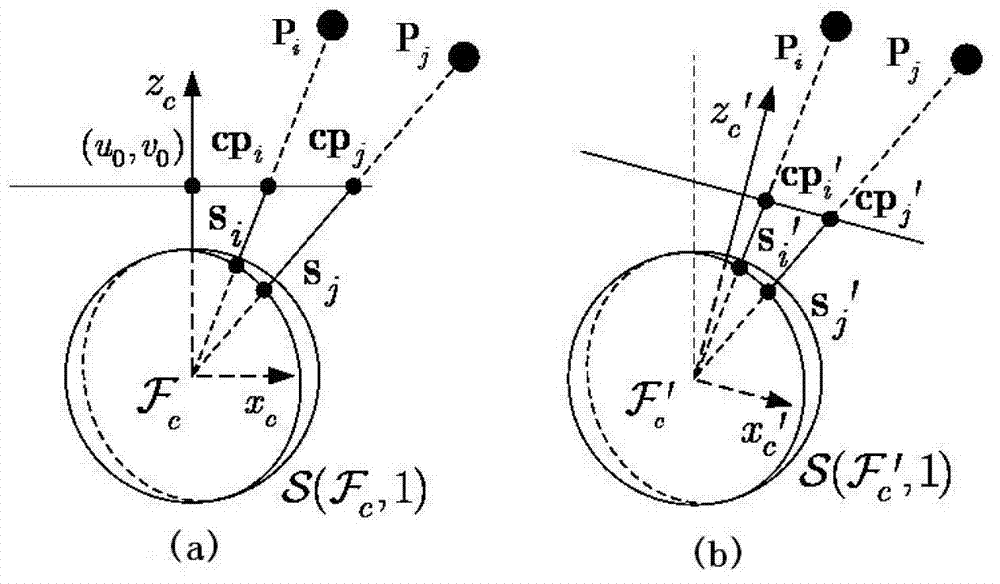
[0137] For a camera in pure rotational motion, and Respect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More