

Robot body modularization linkage device for single-drive multi-legged robot
A multi-legged robot and linkage technology, applied in the field of robotics, can solve problems such as difficulty in controlling motion characteristics, affecting the precise description of robot kinematics and dynamics mathematics, and complex robot structure, achieving strong practical value, reliability and stability. High and wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
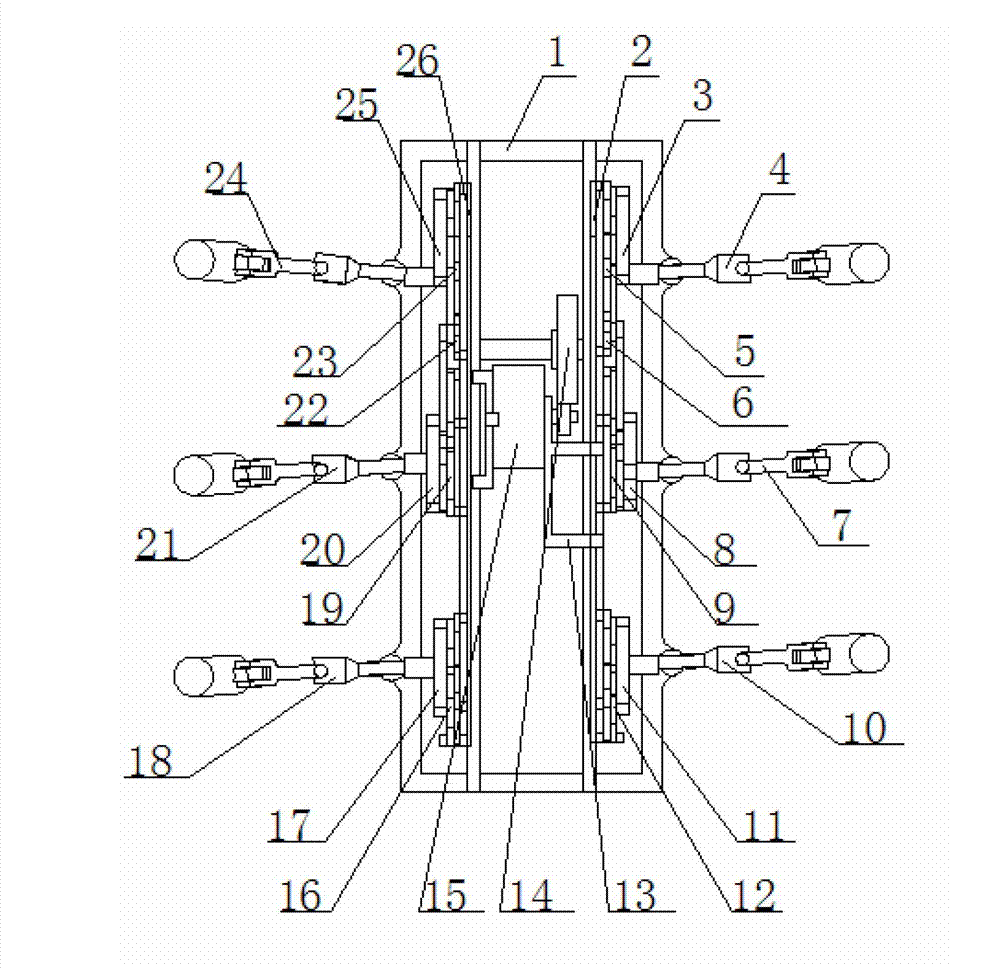
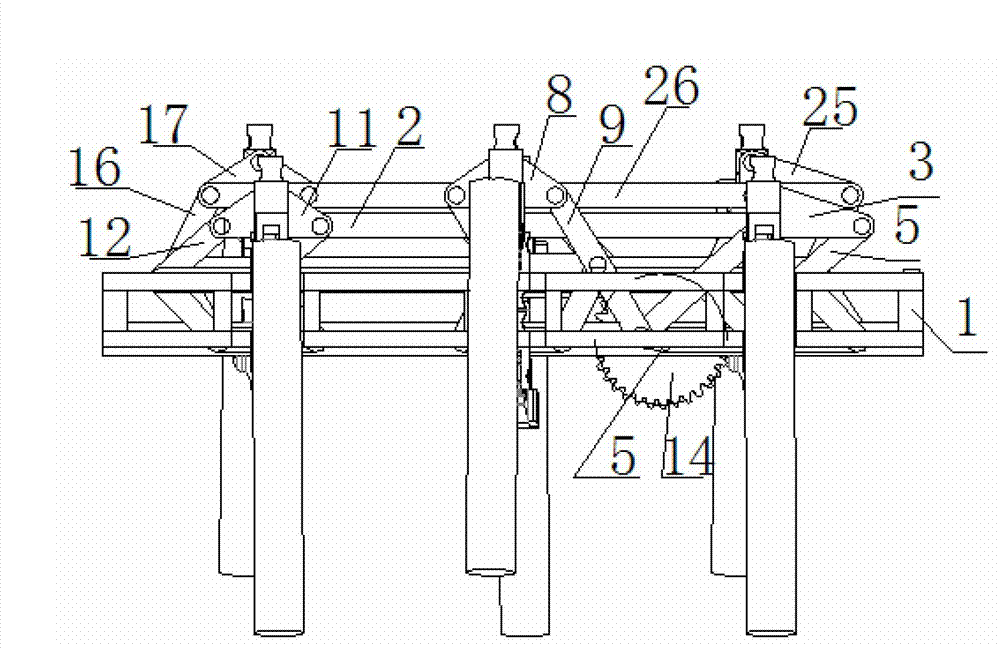
[0038] Single-drive multi-legged robot body modular linkage, such as figure 1 with figure 2 As shown, it includes a main frame 1, a first connecting frame 2 and a second connecting frame 26, the first to sixth grippers 3, 8, 11, 17, 20, 25, the first to sixth hip mechanisms 4, 7, 10, 18, 21, 24, first to sixth double parallelogram linkage mechanisms 5, 9, 12, 16, 19, 23, first crank 6, second crank 22, motor fixing frame 13, power transmission rod 14. Motor 15; motor 15 is fixed on main frame 1 by motor fixing frame 13; first to sixth double parallelogram linkage mechanisms 5, 9, 12, 16, 19, 23 are all arranged on both sides of main frame 1 The first to sixth hip mechanisms 4, 7, 10, 18, 21, 24 are connected to the first to sixth double parallelogram linkage mechanism 5 through the first to sixth grippers 3, 8, 11, 17, 20, 25 , 9, 12, 16, 19, 23 are connected, and the double parallelogram linkage mechanism in front of the same side is connected with the double parallelogram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More