

Mobile terminal and method for obtaining position information of mobile terminal
A mobile terminal, location information technology, applied in the directions of location information-based services, measurement devices, wireless communication, etc. consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
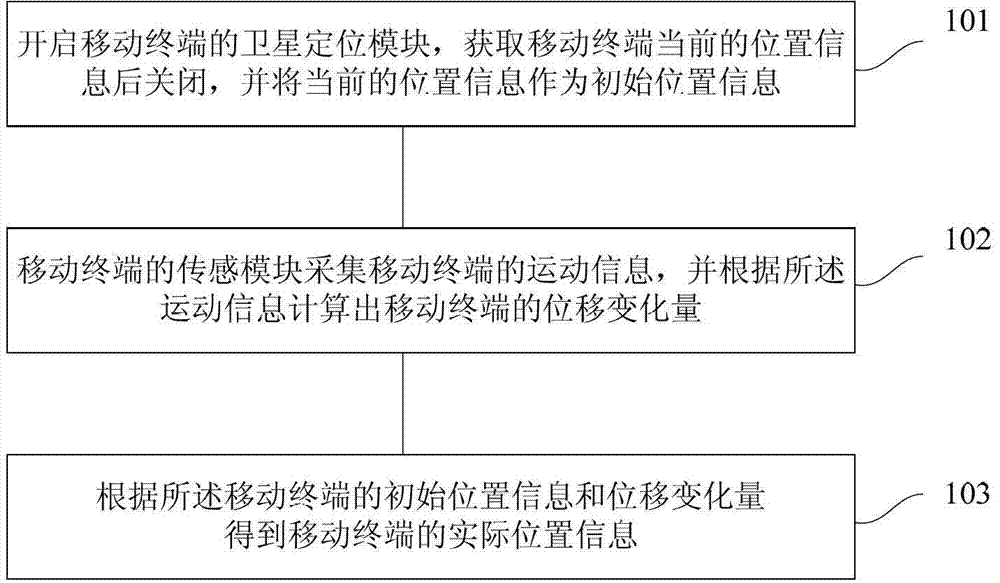
[0043] Please refer to figure 1 , is the method for obtaining the location information of the mobile terminal in this embodiment, including:
[0044] Step 101: Turn on the satellite positioning module of the mobile terminal, close it after obtaining the current location information of the mobile terminal, and use the current location information as the initial location information;
[0045] Step 102: The sensing module of the mobile terminal collects motion information of the mobile terminal, and calculates the displacement variation of the mobile terminal according to the motion information;
[0046] Step 103: Obtain the actual location information of the mobile terminal according to the initial location information and the displacement variation of the mobile terminal.
[0047] The method of this embodiment may further include: periodically turning on the satellite positioning module of the mobile terminal to acquire the current location information of the mobile terminal, ...
Embodiment 2
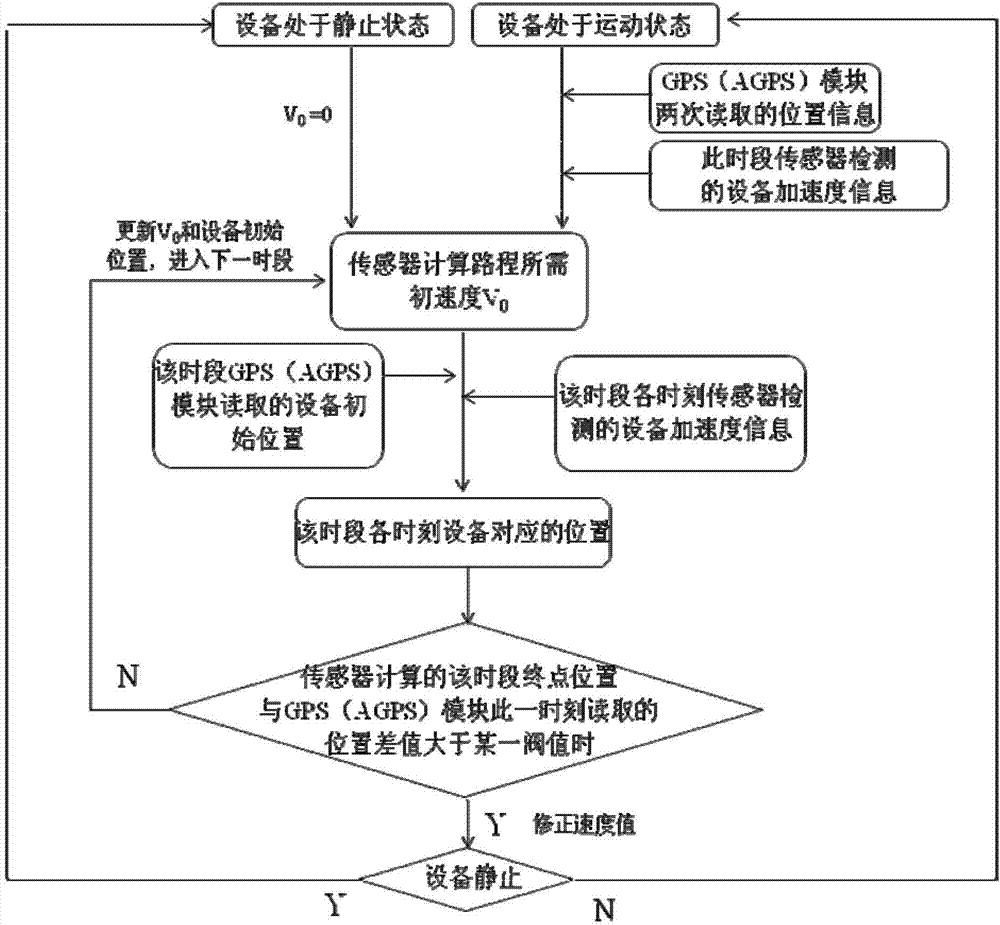
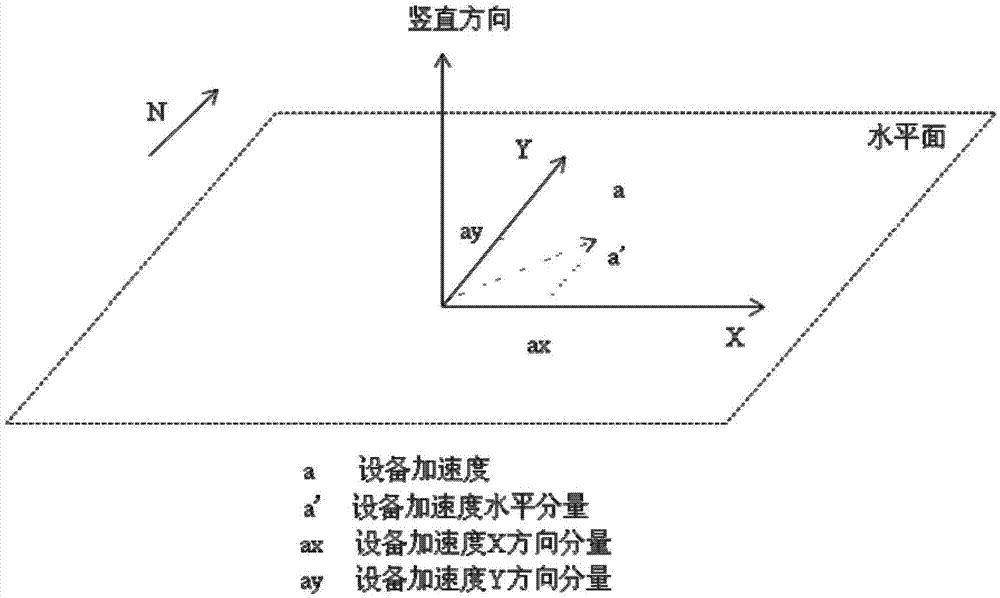
[0079] Based on the method for acquiring location information of a mobile terminal in Embodiment 1, this implementation takes a mobile phone with a GPS or AGPS module as an example. The basic idea is: take the device position read by the GPS (AGPS) module as the origin, use the acceleration sensor and electronic compass to measure the device acceleration, calculate the device displacement increment, thereby calculate the actual position of the device at the corresponding time, and update the device position in time information; the GPS (AGPS) module reads the position information again, updates the initial position of the device (that is, the origin of the last displacement), sets the displacement increment to 0, recalculates the displacement increment, and cycles in this way; the GPS ( The specific time threshold or displacement threshold of the position information read by the AGPS) module makes the reading frequency lower, such as reading once per minute, so that the GPS (AG...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More