

Method of quickly calibrating oblique redundant strapdown inertial navigation system
A redundant strapdown inertia and calibration method technology, which is applied in aerospace navigation and aviation fields, can solve the problems of calibration parameter estimation divergence, poor versatility, and impact on calibration performance, achieving short time consumption, simple operation, and enhanced observability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
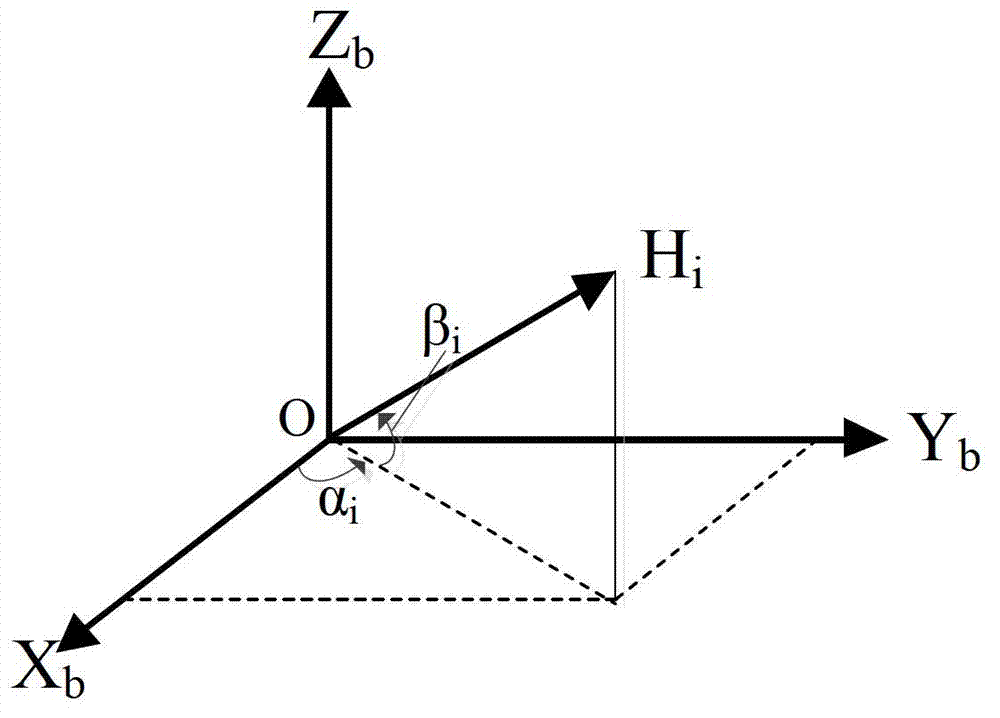
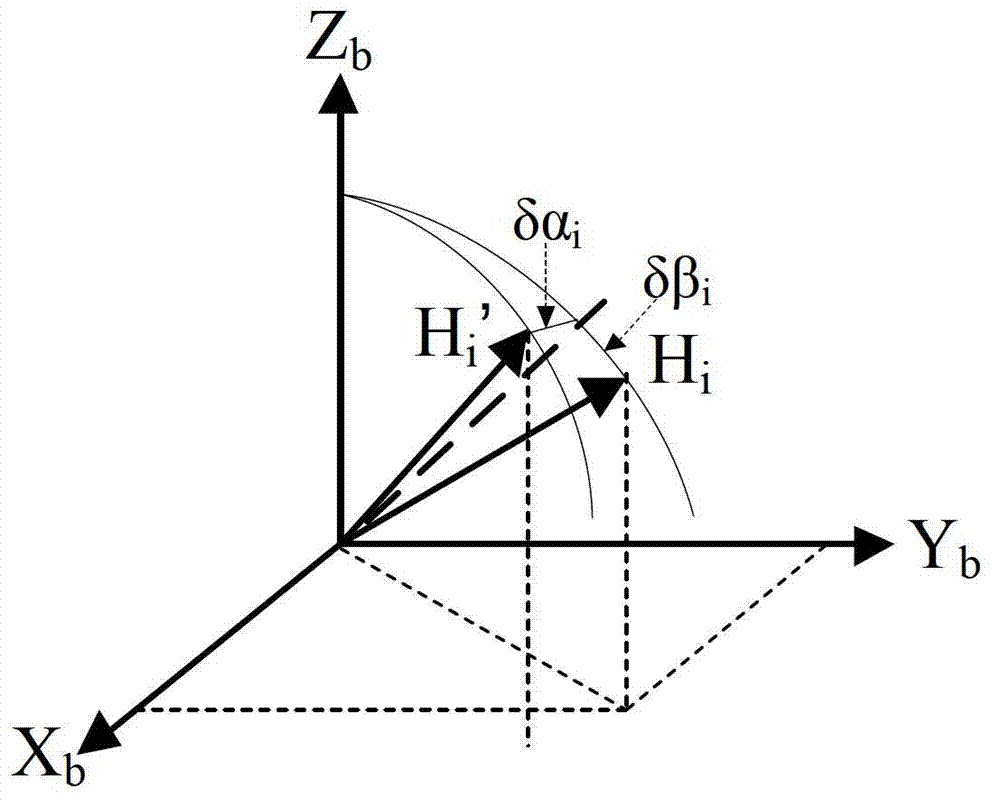
[0028] The present invention is a fast calibration method of oblique redundant strapdown inertial navigation system. First, the calibration measurement equation of oblique RSINS (oblique redundant strapdown inertial navigation system) is given and its installation misalignment is emphatically described. Then the four-position calibration method of the accelerometer and gyroscope is given, and a three-position rotation calibration method is proposed for the low-precision gyroscope; finally, an oblique RSINS calibration simulation platform is built to describe the functions of each functional module, and use the simulation platform Verify the accuracy of the above calibration method.
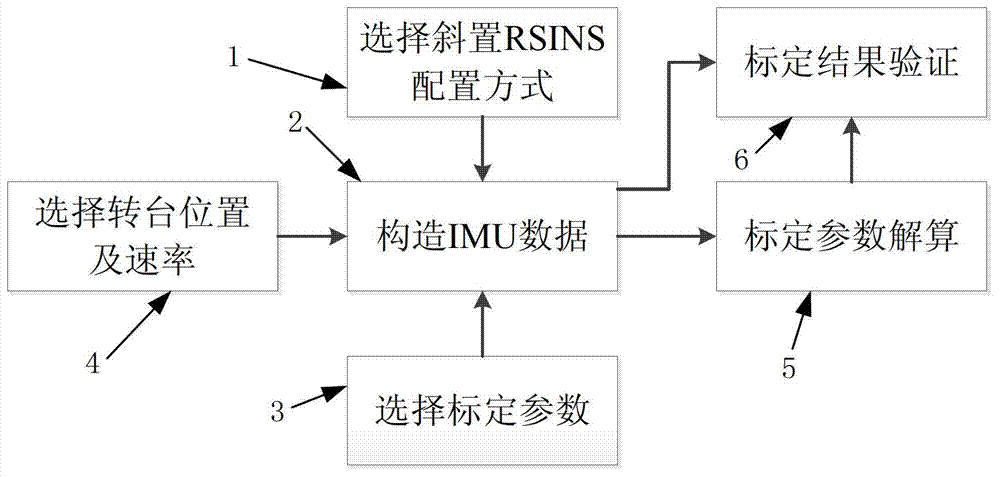
[0029] Process such as Figure 5 shown, including the following steps:
[0030] Step 1: Describe the misalignment angle of the oblique RSINS installation, and construct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More