

Connection rod key slot type coupling under-actuated double-joint robot finger device
A robot finger and double-joint technology, applied in the field of humanoid robot hands, can solve the problems of increased device instability and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific structure and working principle of the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
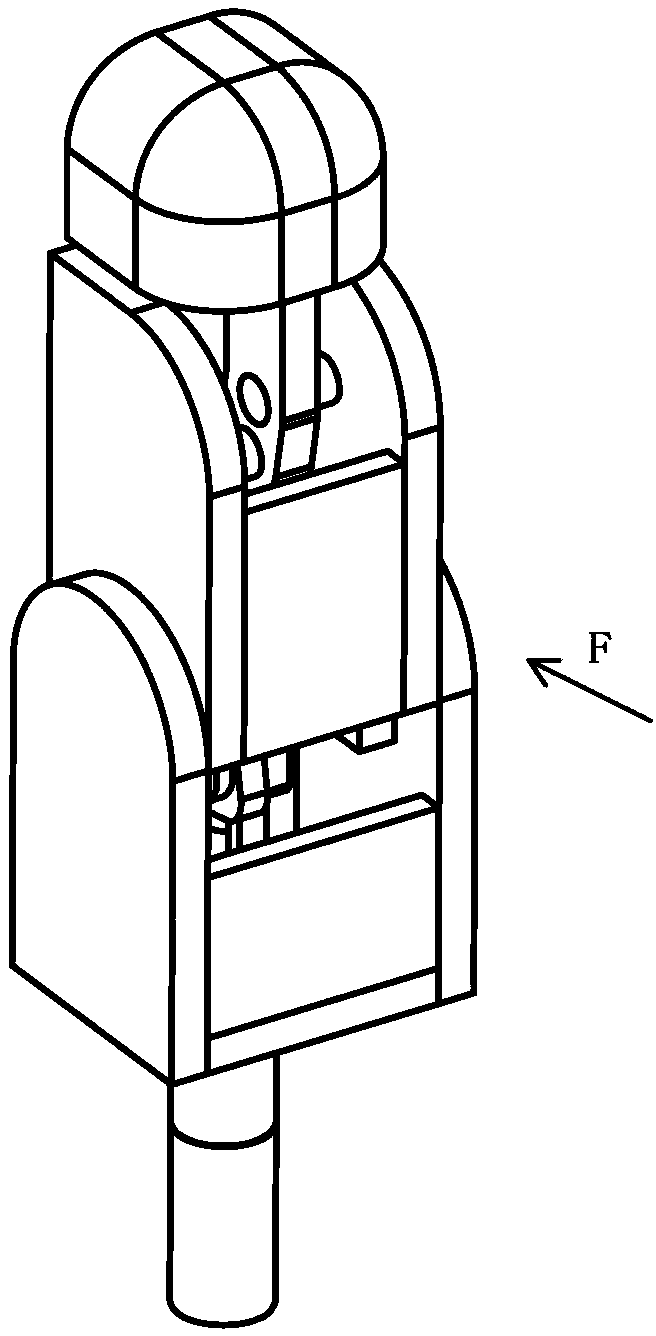
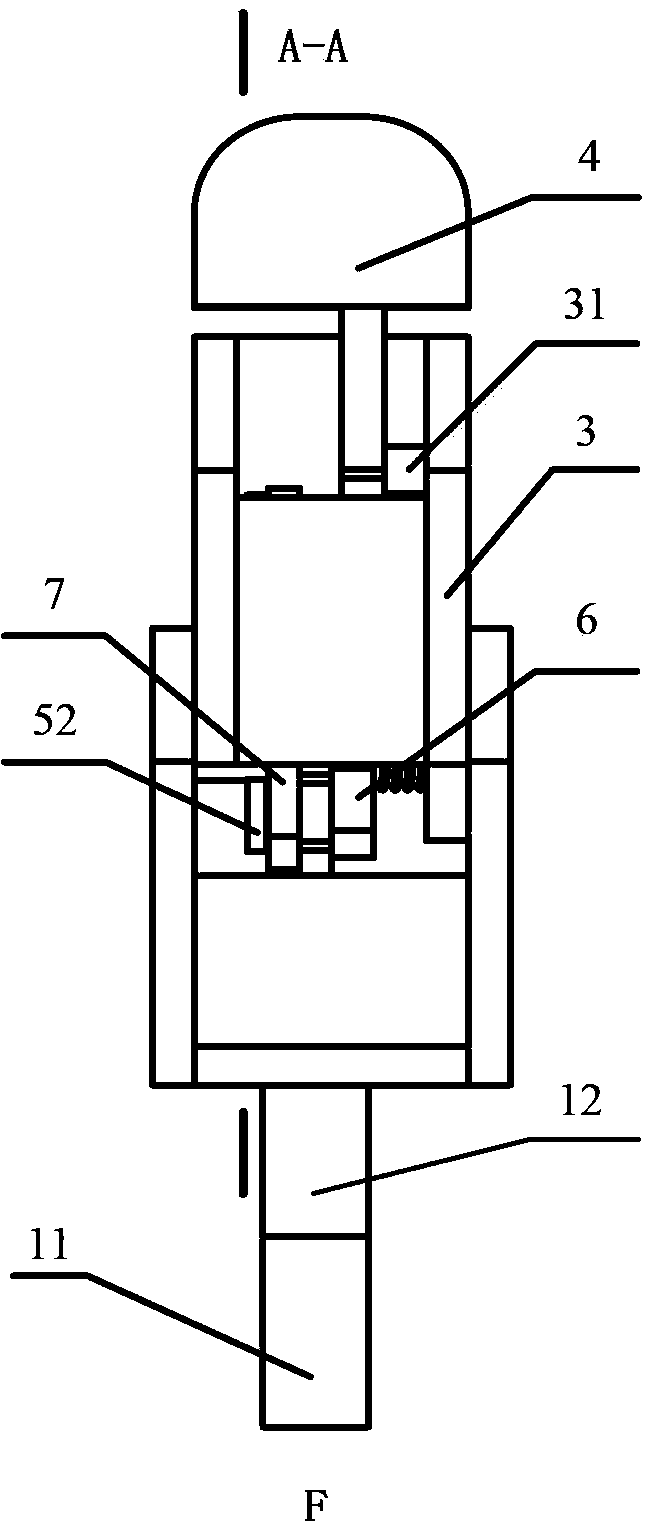
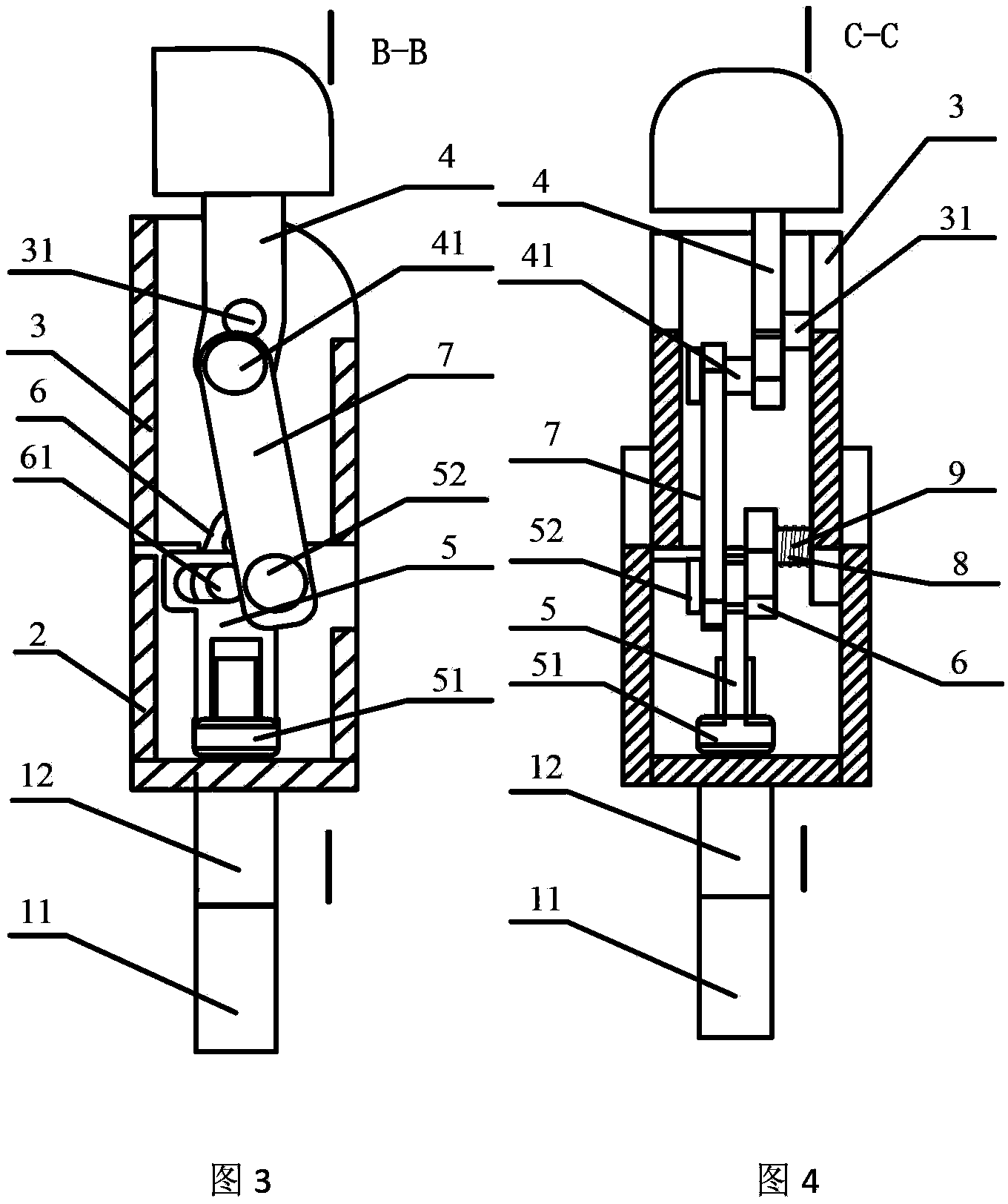
[0036] An embodiment of the link keyway type coupling underactuated robot finger device designed in the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 ,and Image 6 As shown, it includes a base 2, a motor 11, a reducer 12, a first finger segment 3, a second finger segment 4, a distal joint shaft 31, a proximal joint shaft 8 and a coupling transmission mechanism; the motor 11 and the base 2 Fixed connection, the output shaft of the motor 11 is connected with the input shaft of the reducer 12; the proximal joint shaft 8 is sleeved in the base 1, and the distal joint shaft 31 is fixed on the first joint shaft. In the finger segment 3; the first finger segment 3 is sleeved on the proximal joint shaft 8, and the second finger segment 4 is sleeved on the distal jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More