

Point cloud data processing device, point cloud data processing system, point cloud data processing method, and point cloud data processing program
A data processing device and point group technology, applied in the direction of image data processing, image data processing, measuring devices, etc., can solve the problems of large processing time and inconvenient use, so as to shorten the processing time, save the amount of processed data, and save The effect of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
[0065] Hereinafter, an example of a point cloud data processing device will be described with reference to the drawings. The point cloud processing device according to the present embodiment includes a non-plane area removing unit that removes, from point cloud data that associates a two-dimensional image that is a measurement object, with three-dimensional coordinate data of a plurality of points corresponding to the two-dimensional image, Point group data related to non-area areas with a large computational burden. In addition, it is provided with: a surface labeling unit that assigns a label specifying a surface to the point cloud data excluding data of non-plane regions; and a contour calculation unit that uses a local plane based on a local area continuous from the labeled surface to calculate The outline of the object. In addition, a point cloud data reacquisition request processing unit 106 is provided to perform processing related to reacquisition of point cloud data....
no. 2 Embodiment approach
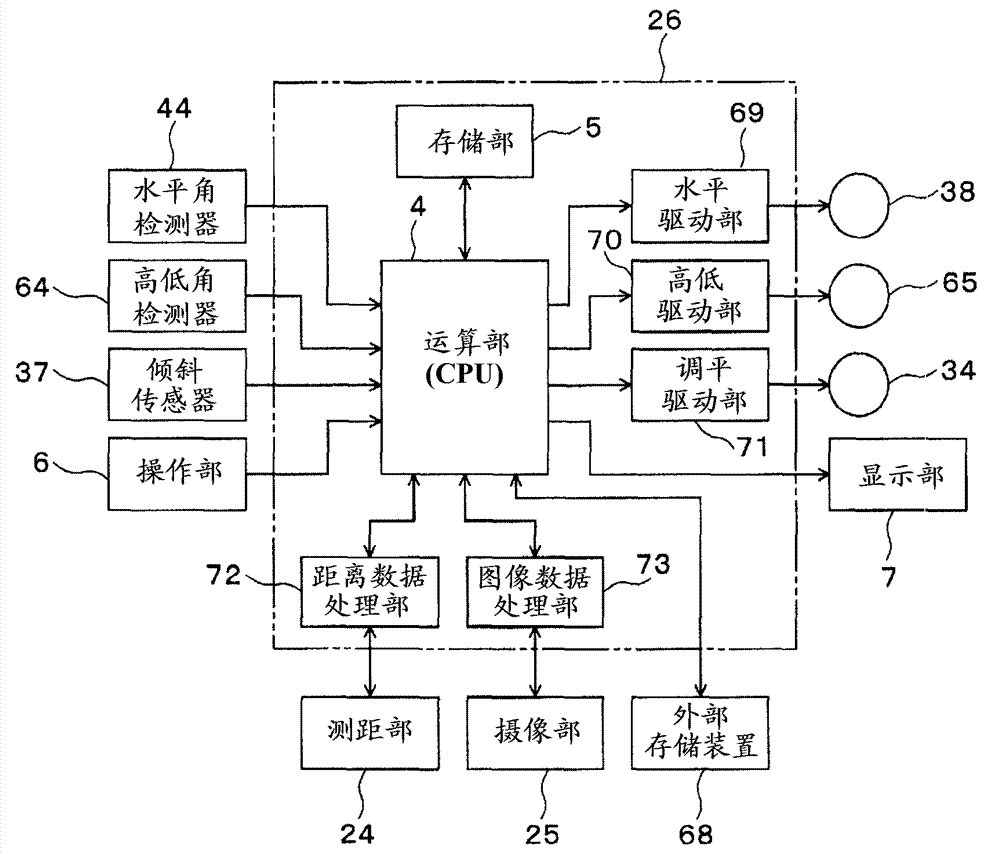
[0157] Hereinafter, a point cloud data processing device including a three-dimensional laser scanner will be described. In this example, the point cloud data processing device scans the object to be measured, irradiates the distance measuring light (laser), and measures distances from its own position to a plurality of measurement points on the object based on the time-of-flight of the laser light. In addition, the point cloud data processing device detects the irradiation direction (horizontal angle and elevation angle) of the laser light, and calculates the three-dimensional coordinates of the measurement point based on the distance and the irradiation direction. In addition, the point cloud data processing device acquires a two-dimensional image (RGB intensity at each measurement point) of the photographed measurement object, and forms point cloud data linking the two-dimensional image and three-dimensional coordinates. The point cloud data processing device further forms a...
no. 3 Embodiment approach
[0189] Hereinafter, a point cloud data processing device including an image measuring device including a stereo camera will be described. The same reference numerals are assigned to the same configurations as those in the first and second embodiments, and description thereof will be omitted.
[0190] (Structure of point cloud data processing device)
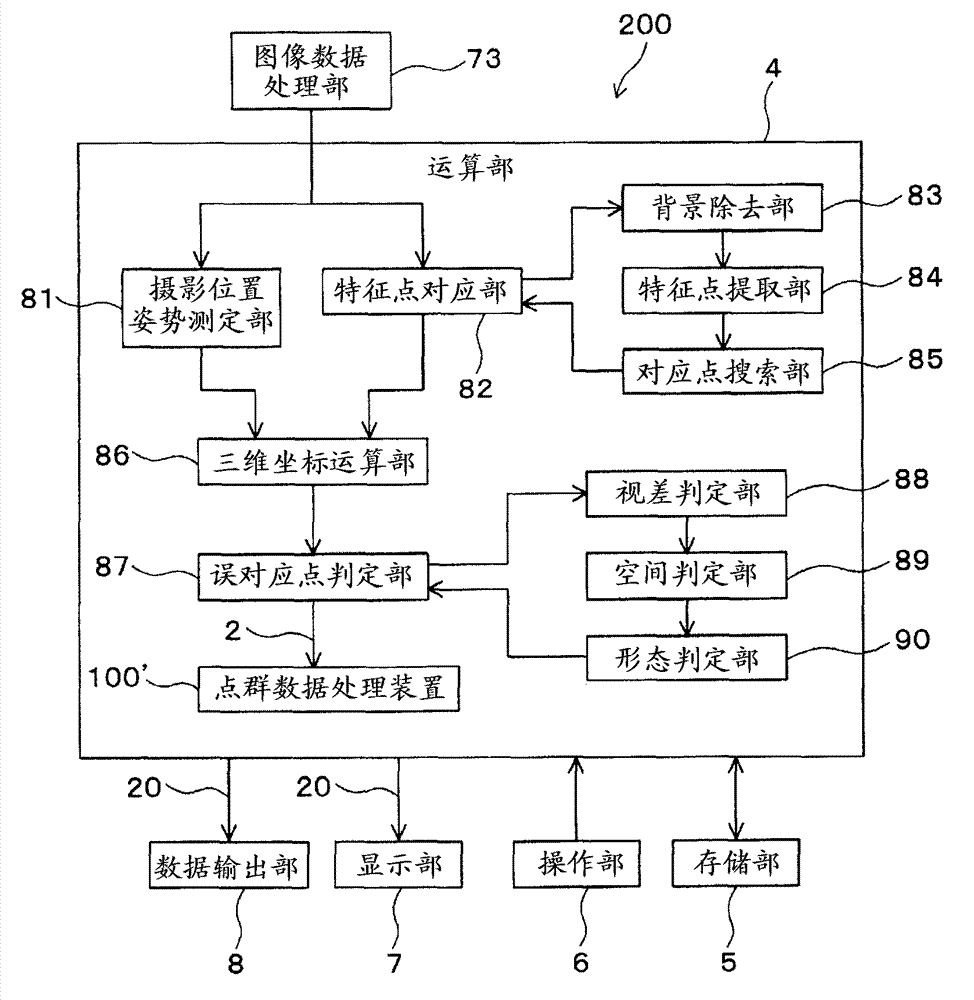
[0191] exist Figure 16 The point cloud data processing device 200 is shown in . The point cloud data processing device 200 has a configuration that combines the image measurement function of a stereo camera and the point cloud data processing function using the present invention. The point cloud data processing device 200 photographs the object to be measured in the photographing area repeated from different directions, and repeats the feature points in the image, based on the position and posture of the photographing part obtained in advance and the position of the feature point in the repeating image, Calculate the three-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More