

Window cleaning device and barrier avoiding method
A technology for wiping glass and obstacles, which is applied in the field of intelligent robots, and can solve problems such as the inability of robots to avoid actions and the dilemma of devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
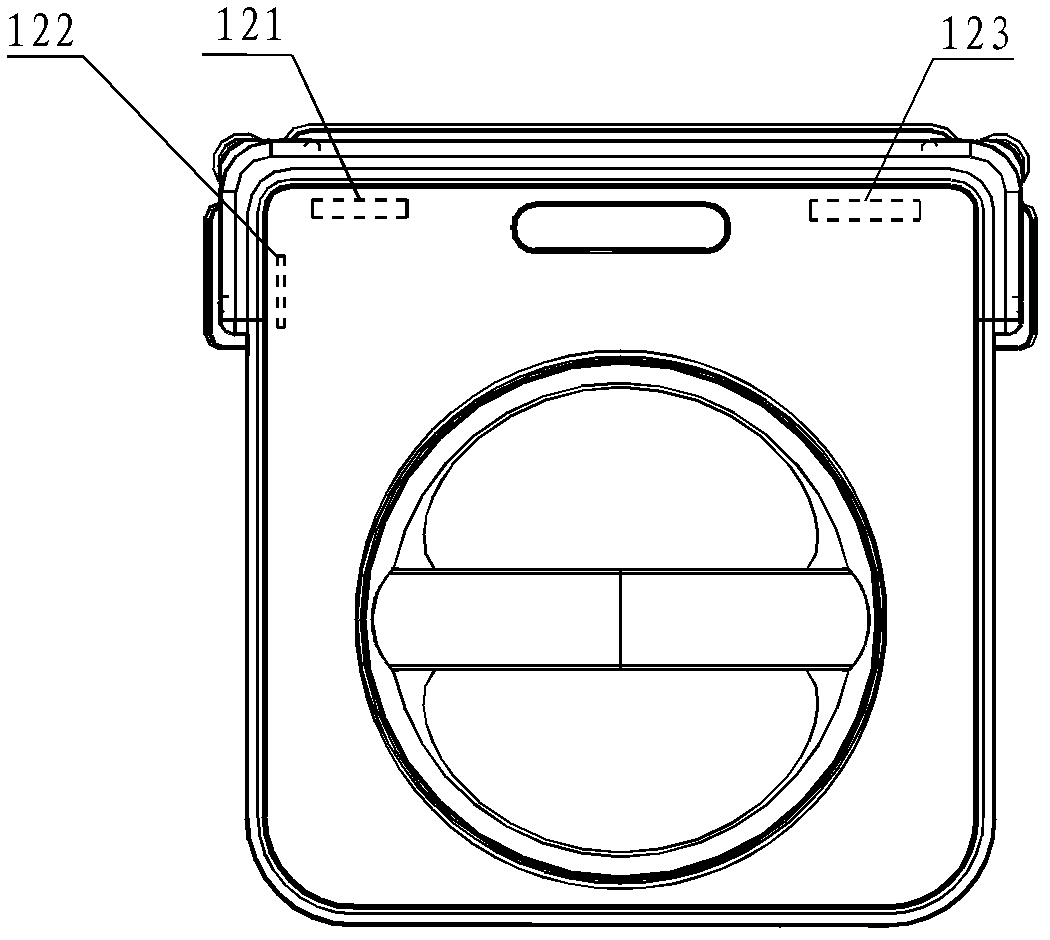
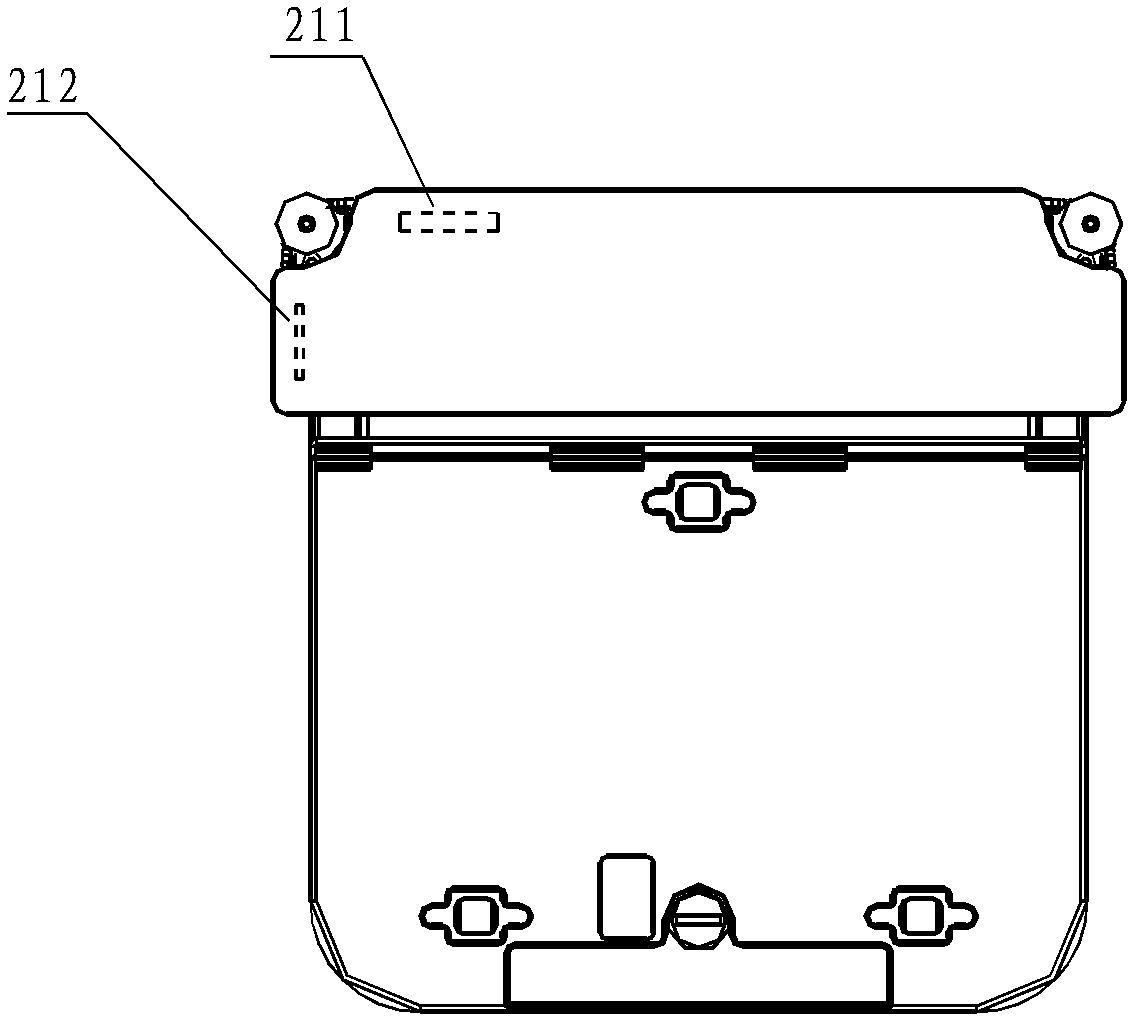
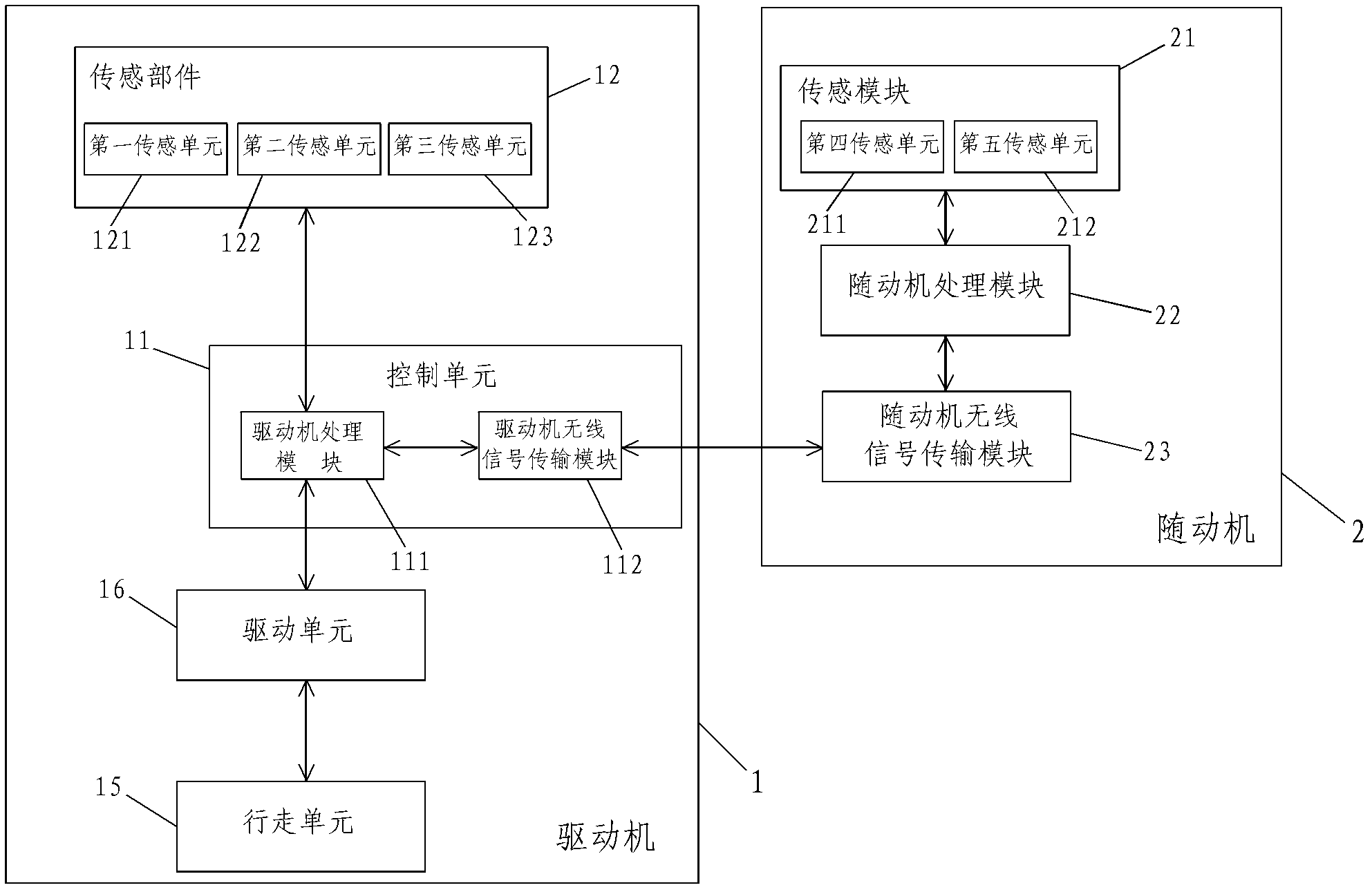
[0044] Such as Figure 1-2 , shown in 4, the glass-wiping device of the present invention comprises a driving machine 1 and a follower 2, and the driving machine is provided with a sensing part 12, a driving unit 16, a walking unit 15 and a control unit 11, and the driving unit 16 drives the walking unit 15 to walk, and the energy The unit is a rechargeable battery, such as: Ni-MH battery or lithium battery and so on. The follower 2 is provided with a glass wiping unit, the driver 1 is built with a first magnet 14 , and the follower 2 is built with a second magnet 24 so that the follower 2 moves with the driver 1 . The control unit 11 is connected with the driving unit 16 and the sensing part 12 respectively; the sensing part 12 includes a first sensing unit 121 positioned at the front end of the driving machine and a second sensing unit 122 positioned at the side of the driving machine, the first sensing unit 121 and the second sensing unit 122 are respectively located on th...
Embodiment 2
[0070] The difference between this embodiment and Embodiment 1 is that the glass-wiping device is a single device that absorbs and moves on the glass surface.
[0071] In this embodiment, the glass-wiping device includes a control unit 11', a driving unit 16', a walking unit 15' and a sensor component 12', the driving unit 16' drives the walking unit 15' to walk, and the control unit 11' communicates with the driving unit respectively 16' is connected to the sensing part 12'; the sensing part 12' includes a first sensing unit 121' located at the front end of the glass-wiping device and a second sensing unit 122' located at the side of the glass-wiping device, the first sensing unit 121' and the second sensing unit 122' are respectively located on the same side of the glass-wiping device.
[0072] The glass-wiping device has an edge-to-edge mode. In the edge-to-edge mode, the control unit 11' controls the glass-wiping device to run on the edge according to the signal received f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More