Restoring method and device for removing imaging distortion of underwater detected target
A technology for underwater detection and target imaging, which is applied in measuring devices, electromagnetic wave reradiation, radio wave measurement systems, etc., and can solve problems such as target imaging distortion in underwater detection target imaging systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0105] Embodiment 1: A restoration method for removing imaging distortion of an underwater detection target includes
[0106] Step 1: According to the coordinates of any image point A actually imaged by the underwater detection target obtained by the xoy image plane of the image acquisition device, and the coordinates of the wave surface point B, it is known that the water depth of the underwater detection target is located on the z axis Therefore, the coordinates of the actual object point C of the underwater detection target corresponding to the actual imaging point A of the underwater detection target can be calculated, where the coordinates of the set point A , the coordinates of point B , point C coordinates , the wave water surface point B is the intersection point of the actual imaging point A of the underwater detection target through the imaging light AP formed by the signal receiving device and the wave water surface;
[0107] Step 2: From the coordinates of the...
Embodiment 2
[0108] Embodiment 2: On the basis of Embodiment 1, the actual object point C of the underwater detection target is calculated in the step 1 The specific process is:
[0109] Step 11: From the geometric relationship, it is easy to know that the equation of the straight line AB is:
[0110] (2)
[0111] Because the Z-axis coordinate of point B is z1=h+s, it can be calculated according to (1) , , Find the coordinates of point B ,in , combined with setting the immediate function of the wave surface as , get the normal of the wave surface at point B on the wave surface The equation is:
[0112] (4)
[0113] in , respectively at point B about and partial derivative of , , where the immediate function is the first optical receiving module to obtain the image of the underwater detection target, and the second optical receiving module to obtain the instantaneous function ...
Embodiment 3
[0125] Embodiment 3: On the basis of Embodiment 1 or 2, there is no wave surface point D in the above 2 The specific process is:
[0126] Step:21: From the CD equation is: (10)
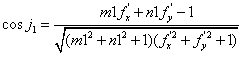
[0127] Let the angle between CD and the normal of the calm water surface be ,but:
[0128] (11)
[0129] Step 22: Let the DE equation be:
[0130] (12)
[0131] Let the angle between DE and the normal of the calm water surface be ,but:
[0132] (13)
[0133] (14)
[0134] Since the three straight lines CD, DE, and the normal of the calm water surface are coplanar, we have:
[0135] (15)
[0136] From formula (11) ~ (15) can get , , to obtain the point D of the waveless water surface .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com