

Automatic obstacle avoidance method for intelligent underwater robots
An underwater robot and robot technology, applied in the directions of instruments, adaptive control, control/regulation systems, etc., can solve the problems of not considering the influence of the underwater robot's obstacle avoidance ability, and unable to truly reflect the dynamic changes of the underwater robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in more detail below in conjunction with accompanying drawing example:
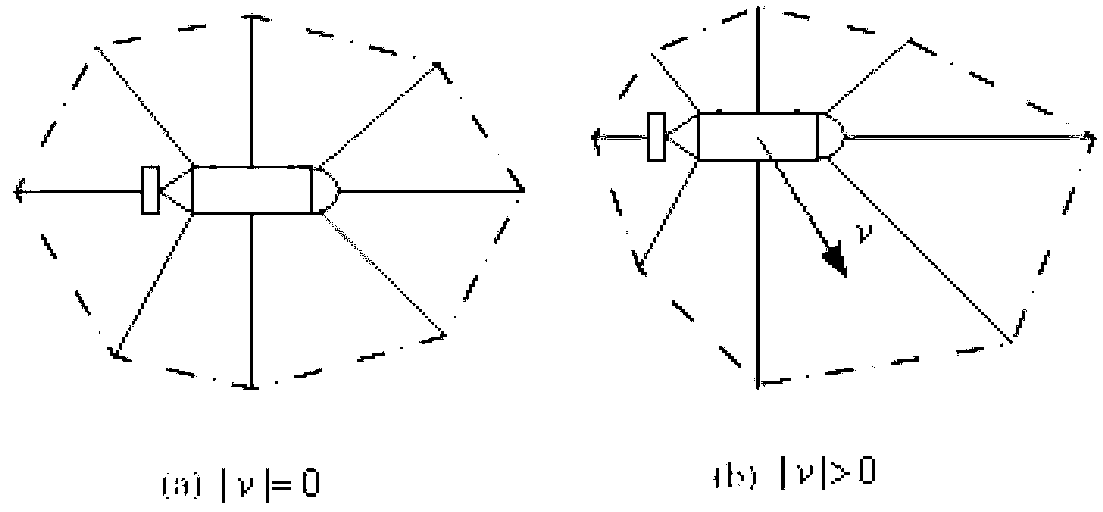
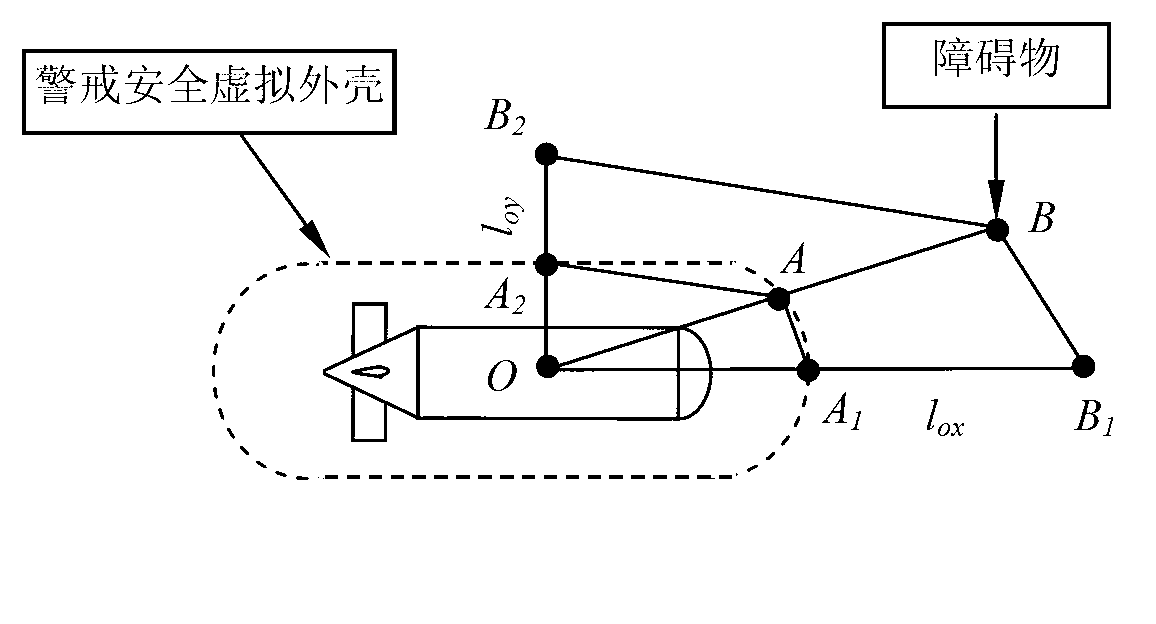
[0036] Intelligent underwater robots work in a complex ocean environment, and there may be unknown obstacles - such as reefs, dams, ships passing by on the navigation route, floating objects in the sea, etc., which may cause the failure of the underwater robot to perform tasks or even Threat to the life of underwater robots. Under different motion states, underwater robots have different obstacle avoidance capabilities. In view of this situation, the present invention proposes an autonomous obstacle avoidance method for intelligent underwater robots. Considering the control performance of the underwater robot uniformly, the obstacle avoidance ability of the underwater robot is closely related to its motion state.
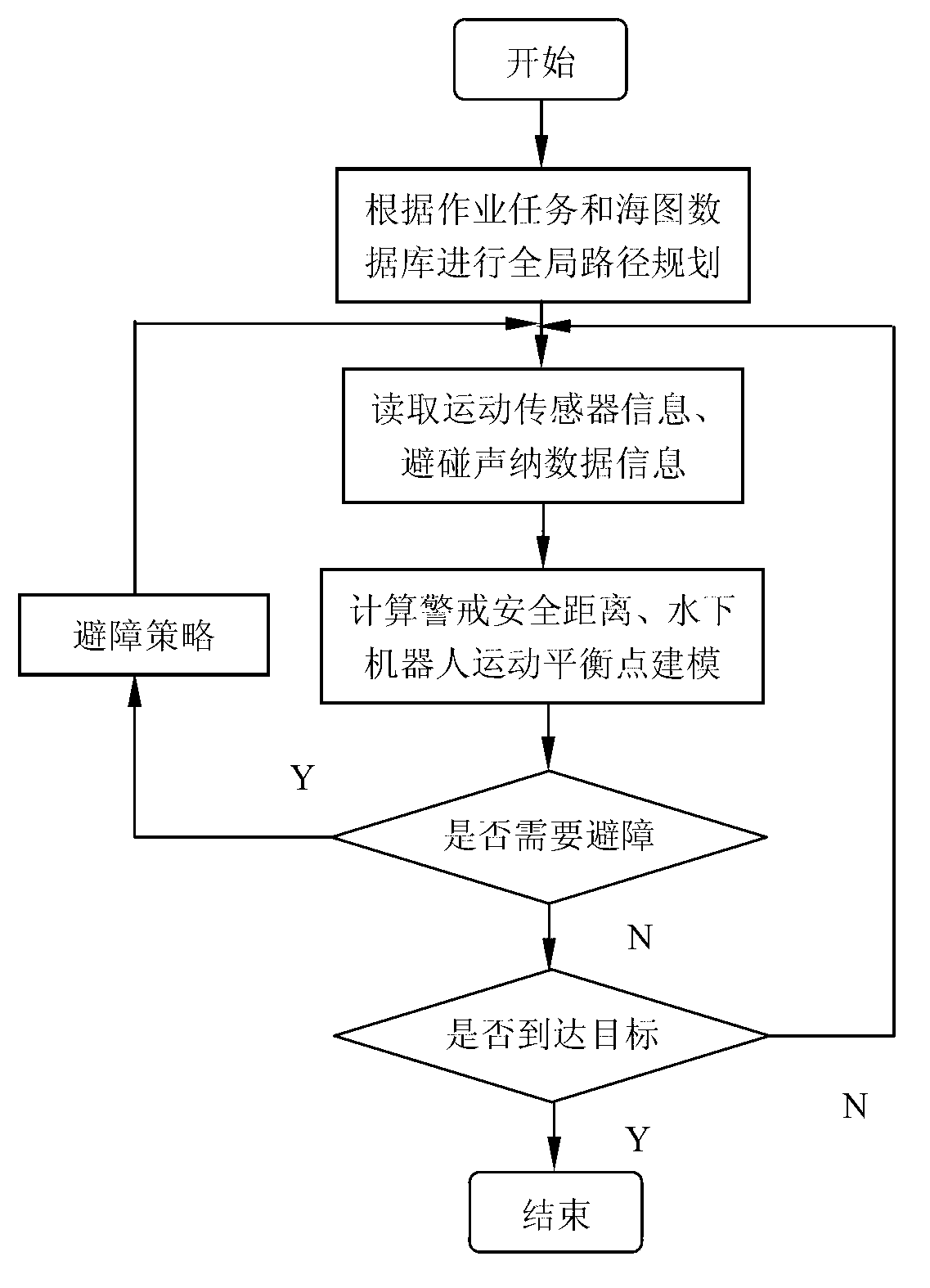
[0037] figure 1 It is a flow chart of the present invention. First, the intelligent underwater robot performs global path planning according to its c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More