Dynamic isotropic generalized Stewart fault-tolerant parallel mechanism and design method thereof
An isotropic, design method technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the intrinsic safety of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
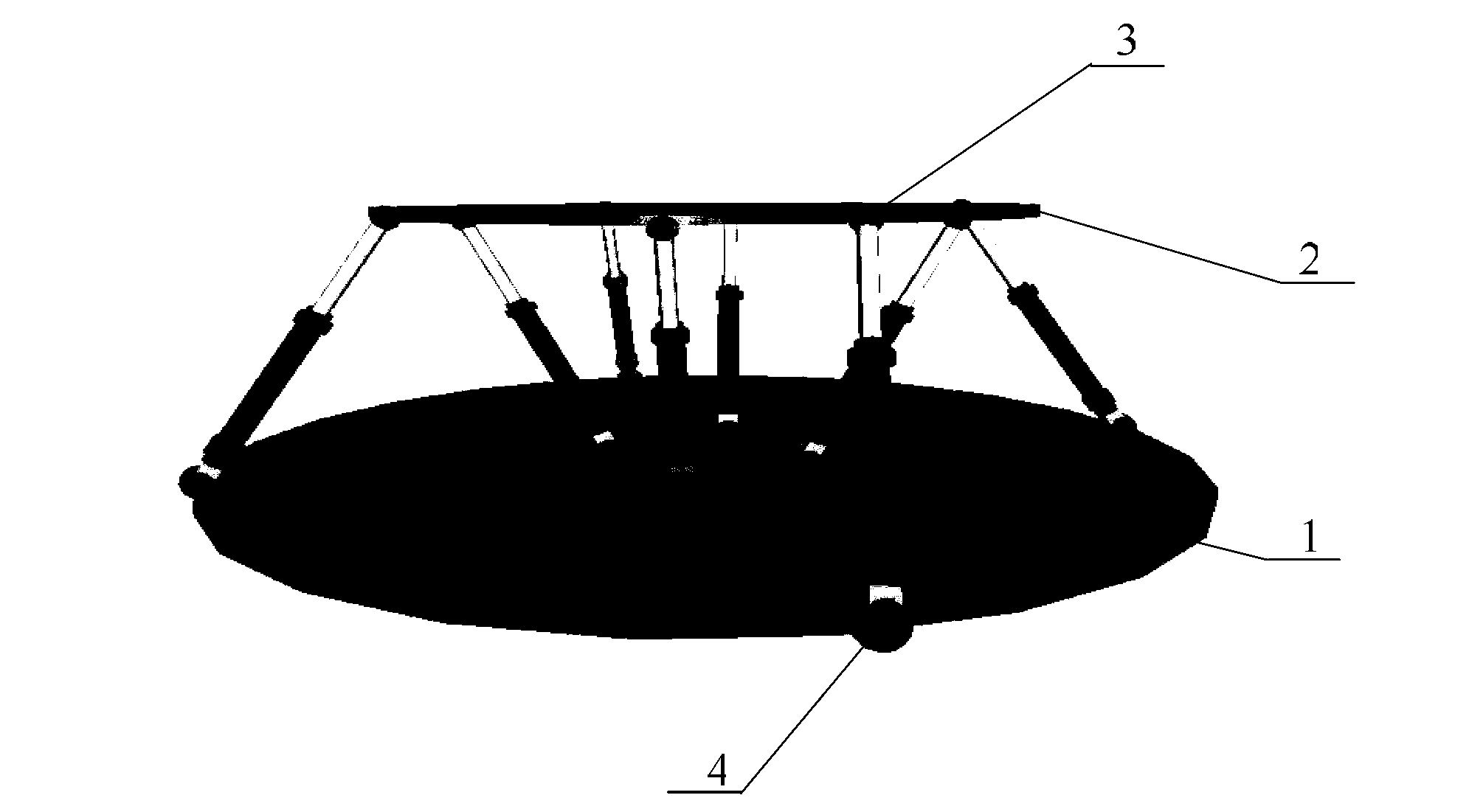
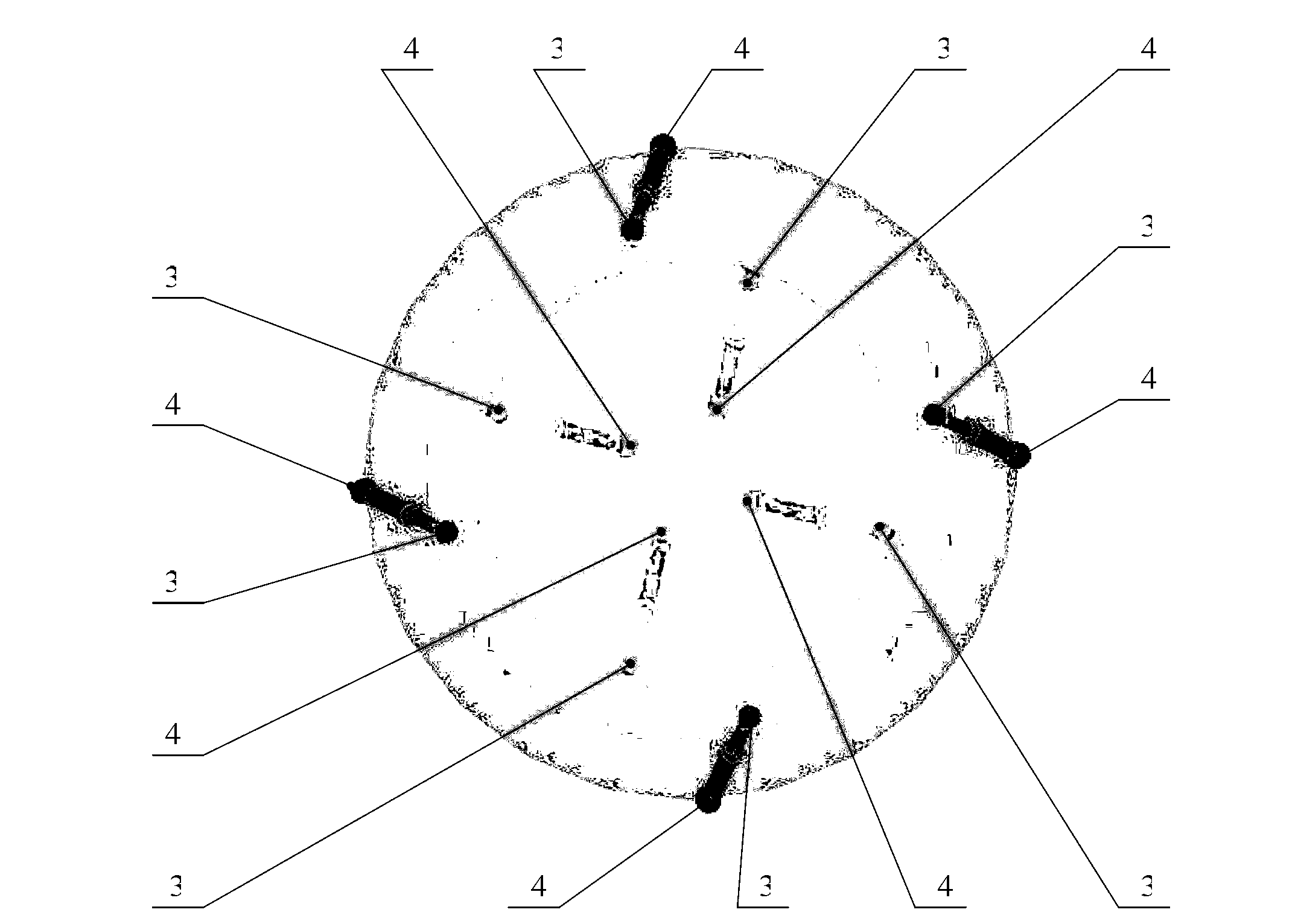
[0016] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment, the dynamic isotropic generalized Stewart fault-tolerant parallel mechanism described in this embodiment includes a lower platform 1, an upper platform 2, a first outrigger, a second outrigger, a third outrigger, a third outrigger, a fifth outrigger Legs, sixth leg, seventh leg, eighth leg, eight upper hinge assemblies 3 and eight lower hinge assemblies 4, the upper end of the first leg, the upper end of the third leg, the fifth leg The upper end of the upper end and the upper end of the seventh leg are respectively installed on the upper platform 2 through an upper hinge assembly 3 with a radius of r a1 On the circumference of the first upper hinge circle, the lower end of the first leg, the lower end of the third leg, the lower end of the fifth leg, and the lower end of the seventh leg are respectively installed on the lower platform 1 through a lower hinge assembly 4 radius ...
specific Embodiment approach 2
[0017] Specific implementation mode two: combination figure 1 with figure 2 To illustrate this embodiment, the lower hinge component 4 of the dynamic isotropic generalized Stewart fault-tolerant parallel mechanism described in this embodiment is a spherical hinge, Hooke hinge or elastic hinge, and the upper hinge component 4 is a spherical hinge, Hooke hinge or elastic hinge. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0018] Specific implementation mode three: combination figure 1 with figure 2 Describe this embodiment, the first leg, the second leg, the third leg, the fourth leg, the fifth leg, the sixth leg, Both the seventh leg and the eighth leg are servo hydraulic cylinder linear brakes or servo electric cylinder linear brakes. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com