

Obstacle avoidance system of mountain farming robot on basis of multi-sensor information fusion
A multi-sensor and robot technology, which is applied in the field of mountain agricultural robot obstacle avoidance system and obstacle avoidance system, can solve the problems of poor real-time performance, one-sided information acquisition, insufficient obstacle avoidance accuracy, etc., achieve higher speed, improve accuracy, and avoid measurement The effect of blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
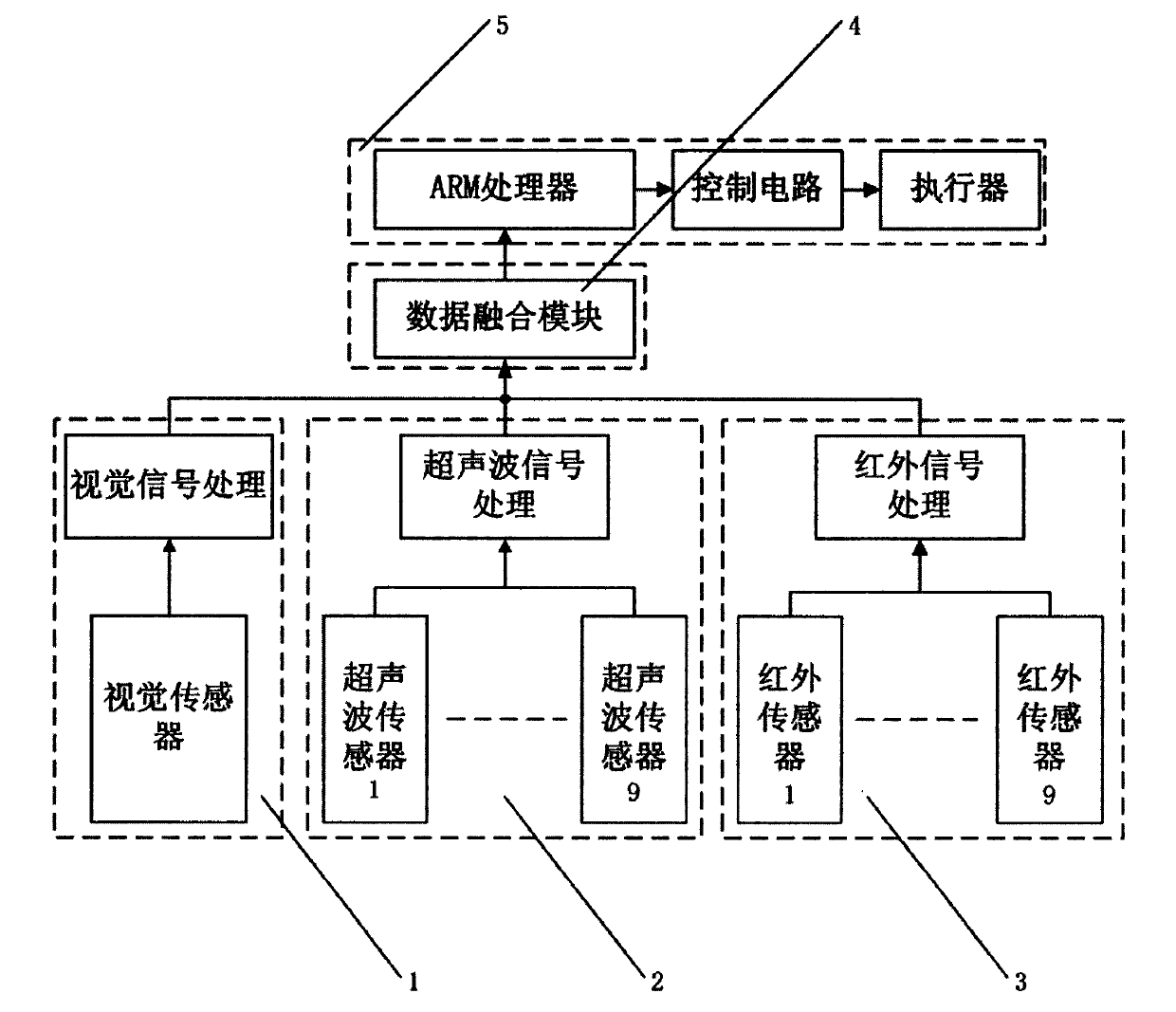
[0019] figure 1 Is the overall structure block diagram of the present invention. The visual sensor, ultrasonic sensor and infrared sensor collect and process the surrounding environment obstacle information through their corresponding DSP high-speed processors. After the obstacle information is processed, the DSP signal processor (TMS320F2812 chip) of the data fusion module receives the data and receives all the data. After the data, the DSP signal processor fuses the received data according to specific fusion rules, and then transmits the fusion data to the ARM processor (S3C2410) of the control module, and the ARM processor (S3C2410) performs behavioral decision-making and control, and then By controlling the actuator, the mountain agricultural robot performs corresponding forward, backward, left and right steering or braking actions to complete real-time obstacle avoidance.
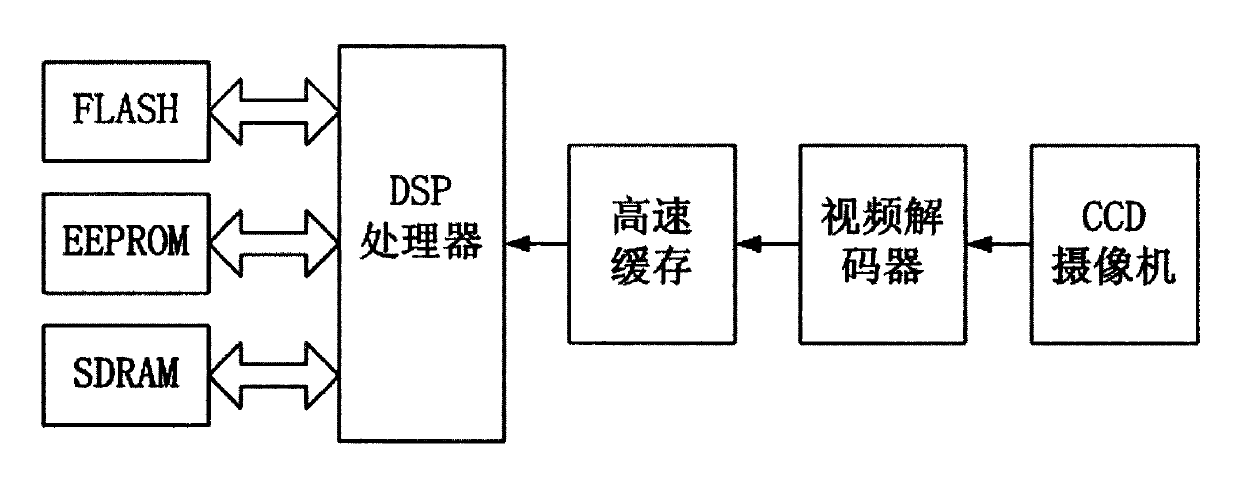
[0020] figure 2 It is a structural block diagram of the visual sensor module of the present inve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More