Generalized stereopair three-dimensional reconstruction method adopting variance component estimation
A technique of variance component estimation and stereo image pairing, which is applied in the field of 3D reconstruction, can solve the problems of resolution difference, image resolution difference, and imbalance of 3D reconstruction methods, so as to improve the utilization efficiency and improve the accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
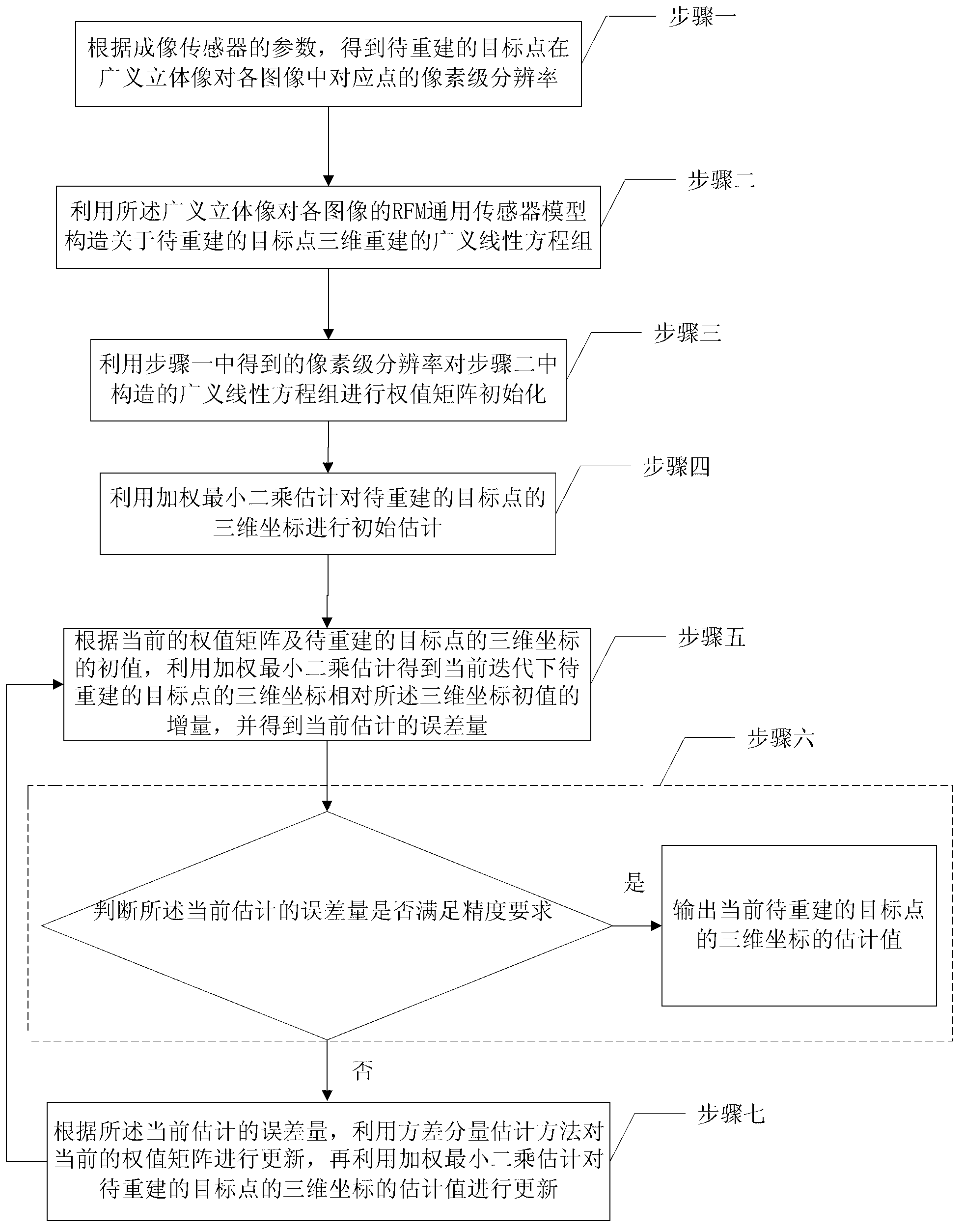
[0020] Specific implementation mode one: combine figure 1 Describe this embodiment, the generalized stereo image pair three-dimensional reconstruction method using variance component estimation described in this embodiment,
[0021] It includes the following steps:
[0022] Step 1: According to the parameters of the imaging sensor, obtain the pixel-level resolution of the corresponding point of the target point to be reconstructed in each image of the generalized stereo pair;
[0023] Step 2: Utilize the RFM universal sensor model of each image of the generalized stereo image to construct a generalized linear equation system about the three-dimensional reconstruction of the target point to be reconstructed;
[0024] Step 3: Use the pixel-level resolution obtained in Step 1 to initialize the weight matrix of the generalized linear equations constructed in Step 2;
[0025] Step 4: Initially estimate the three-dimensional coordinates of the target point to be reconstructed by w...
specific Embodiment approach 2
[0030] Specific embodiment 2: This embodiment is a further limitation of the generalized stereo image pair 3D reconstruction method described in specific embodiment 1 using variance component estimation,
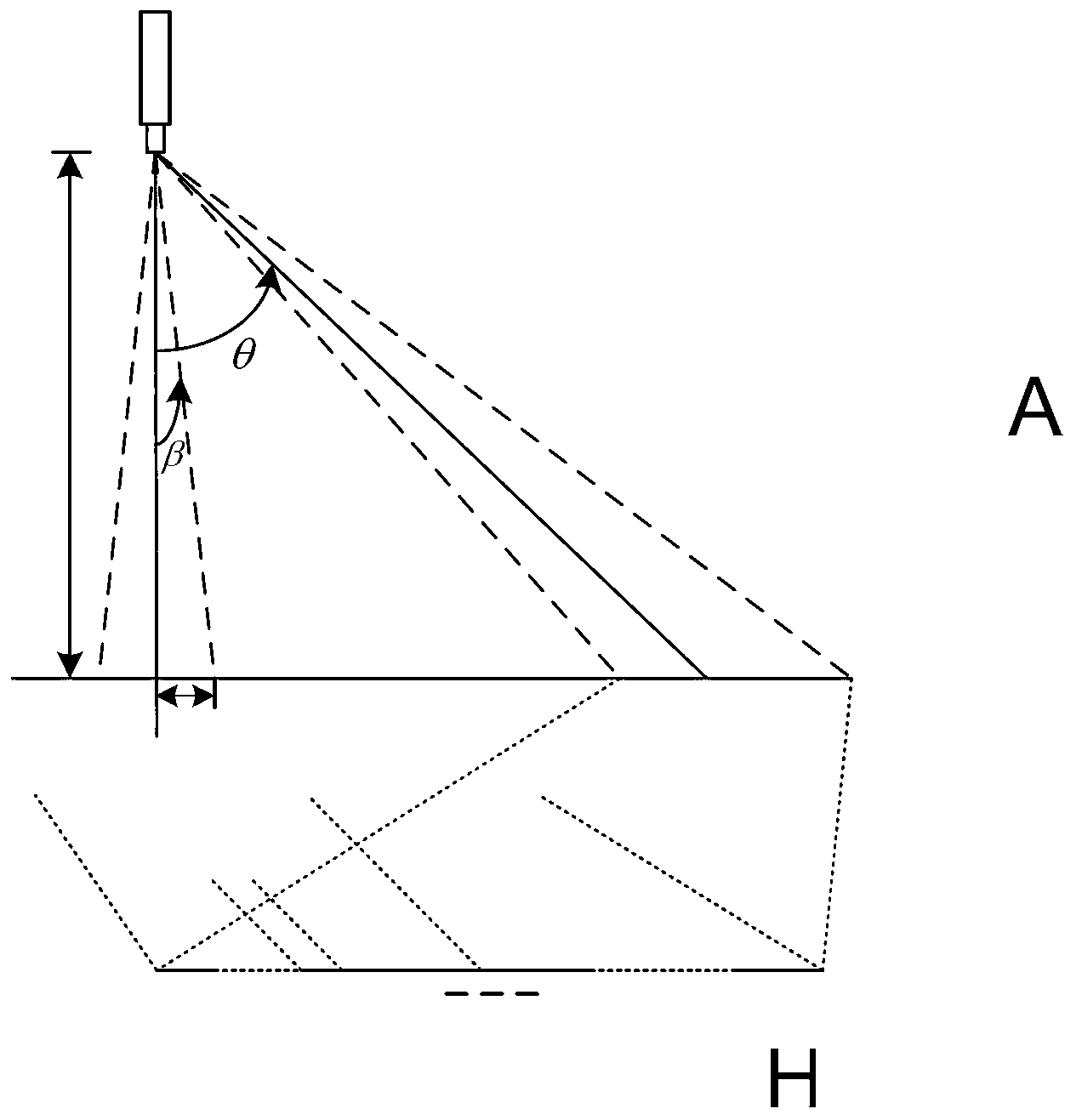
[0031] In step 1, according to the parameters of the imaging sensor, the method of obtaining the pixel-level resolution of the target point to be reconstructed in each image of the generalized stereo pair is as follows:
[0032] According to the height H of the imaging sensor, the instantaneous field of view angle θ, the pitch angle β and the image size N*N, the resolution of the kth pixel in the image obtained by the sensor is:
[0033]
[0034] The resolution Res k As the pixel-level resolution of the target point to be reconstructed in each image of the generalized stereo pair, N is a positive integer.
[0035] In this embodiment, according to the actual situation of the acquired data, first, if the imaging parameters of the imaging sensor can be acquired in detail, s...
specific Embodiment approach 3
[0045] Specific embodiment three: this embodiment is a further limitation of the generalized stereo pair 3D reconstruction method described in specific embodiment one using variance component estimation,
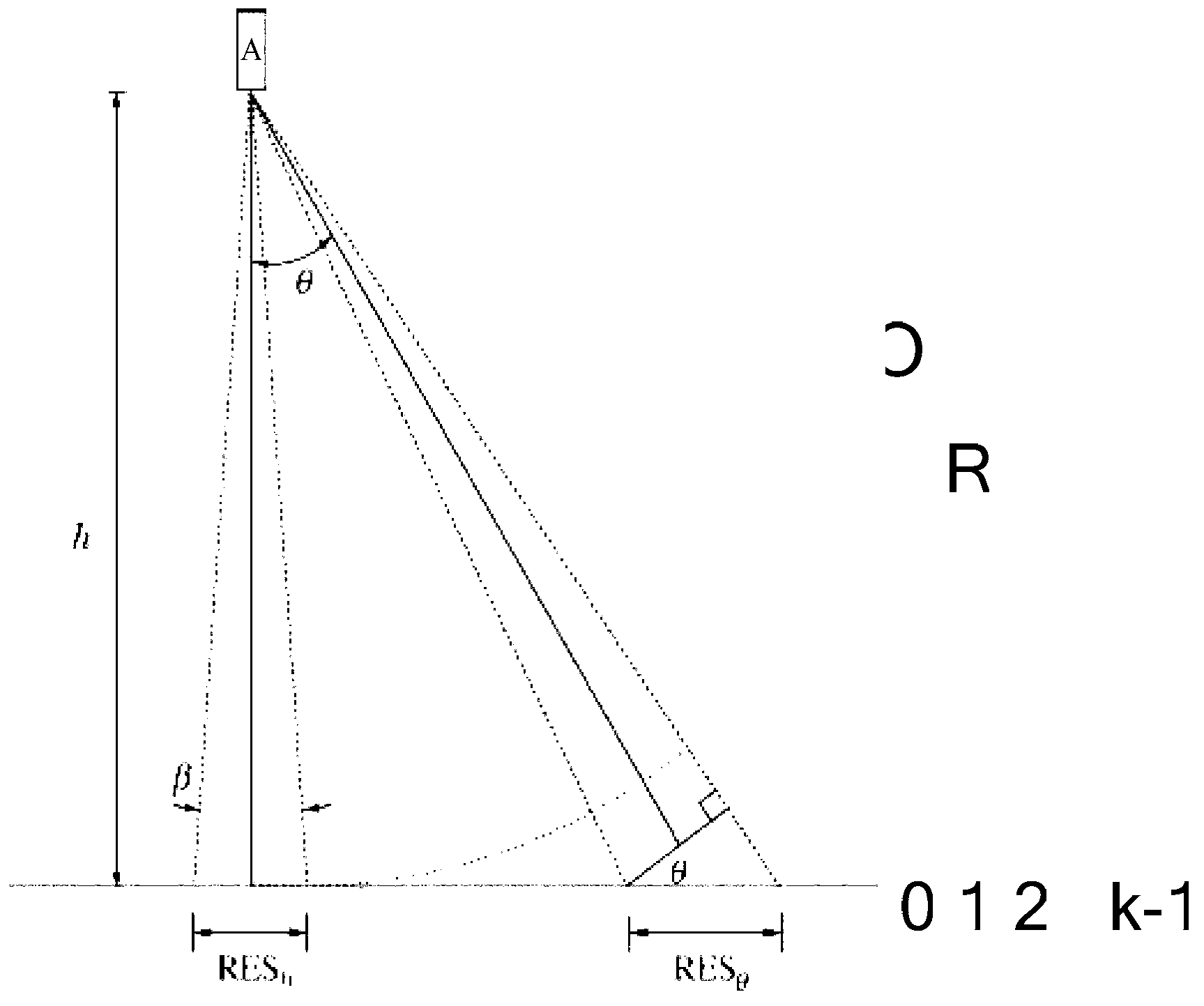
[0046] In step 1, according to the parameters of the imaging sensor, the method to obtain the pixel-level resolution of the corresponding point of the target point to be reconstructed in each image of the generalized stereo pair is: according to the known average resolution Res of the front-view image of the imaging sensor n and the pitch angle β, the pixel-level resolution of the target point to be reconstructed in each image of the generalized stereo pair is obtained as Res β = Res n cos 2 β .
[0047] When only the average resolution of the imaging sensor and its imaging pitch angle a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More