

A control method for stable retraction and release of space vehicle ropes
A technology for a space vehicle and a control method, which is applied in the field of aircraft control and can solve problems such as increasing the difficulty of operation technology and system uncertainty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
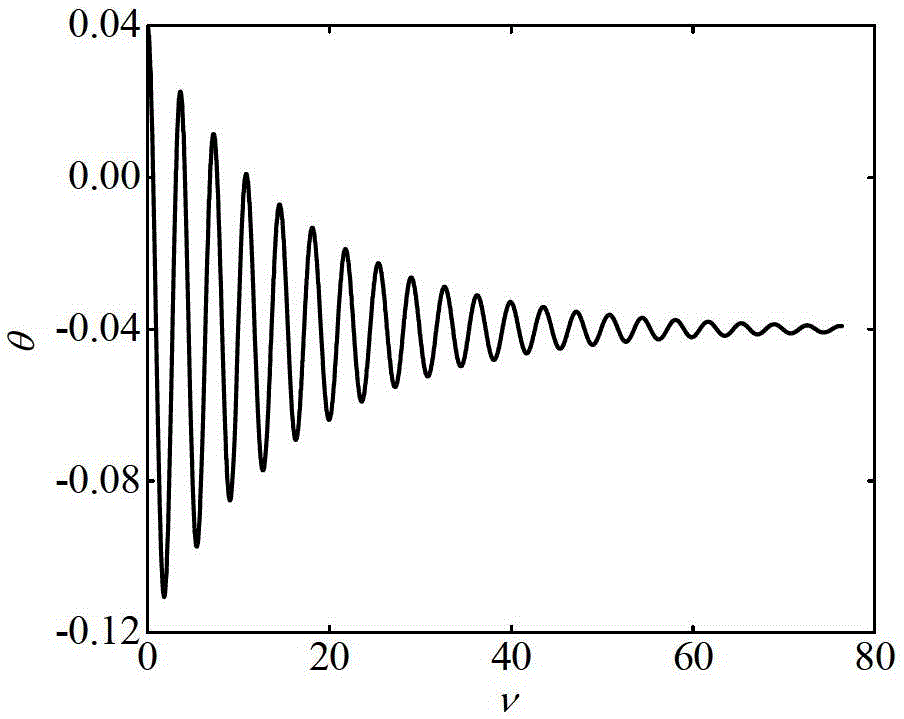
[0059] Based on the speed control of the rope retraction proposed in this patent, a set of parameters is taken to carry out numerical simulation on the release of the spacecraft rope. Assume that the system operates on a Kepler elliptical orbit with eccentricity e=0.05, and the initial true anomaly angle ν 0 = 0; at the initial moment, the system has a perturbed pitch angle θ 0 =0.04, dimensionless rope length ξ 0 =0.01; at the same time, according to the condition of rope asymptotically stable release, the desired pitch angle θ can be taken e =-0.04.
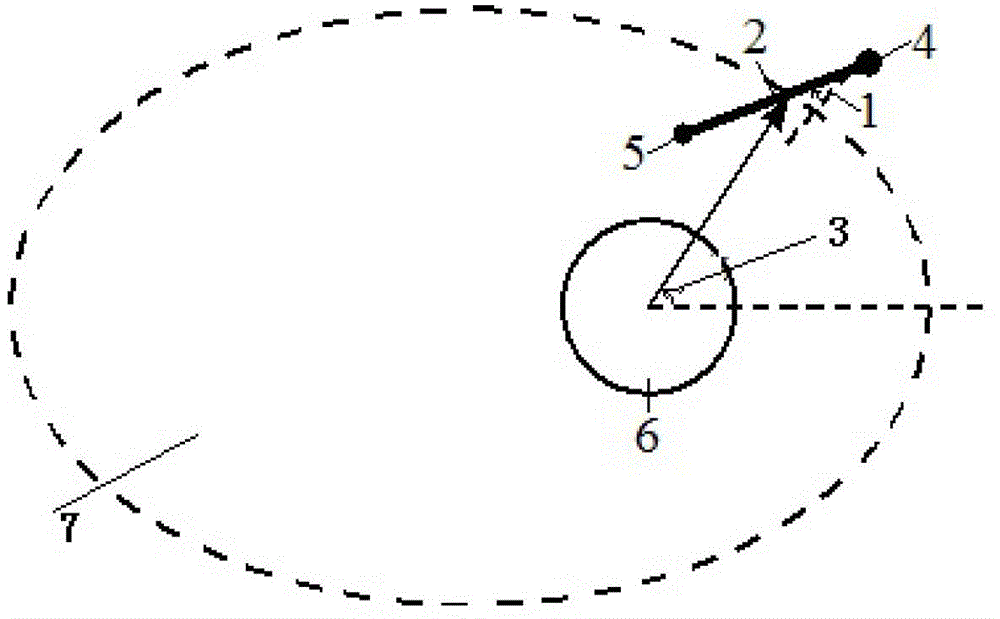
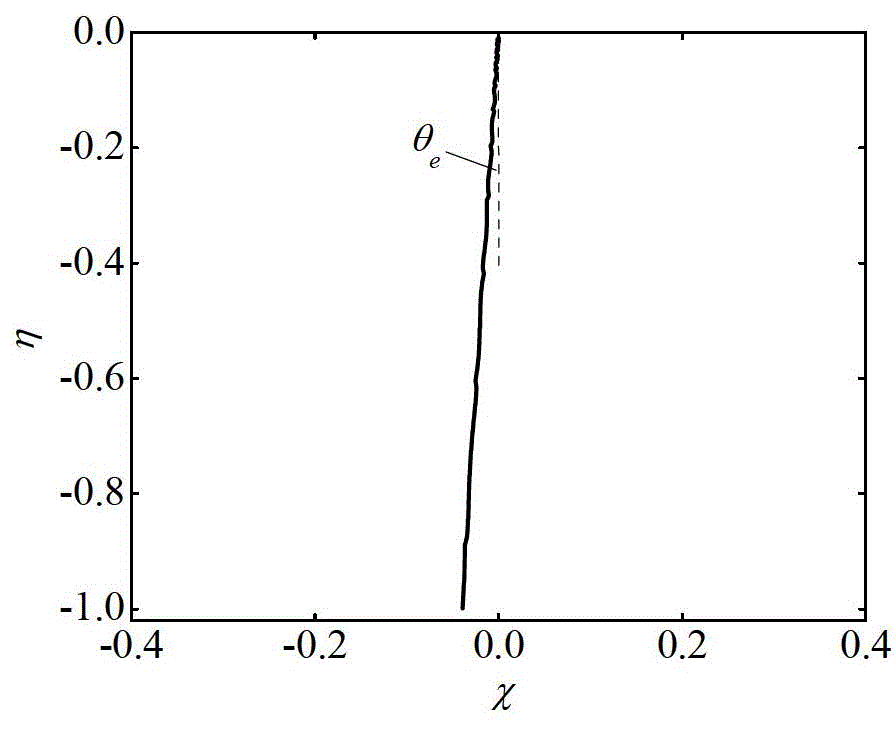
[0060] The numerical simulation results of the embodiment are shown in Fig. 2(a) and Fig. 2(b). Figure 2(a) shows the release trajectory of the rope under the orbital coordinate system o-χη (that is, the origin o is fixed at the center of mass of the aircraft, the x-axis points to the opposite direction of the movement of the center of mass of the system, and the axis η points from the center of mass of the earth to the cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More