

Three-dimensional soft tactile sensor array
A tactile sensor, flexible technology, applied in the measurement of the property force of piezoelectric resistance materials, manipulators, manufacturing tools, etc., can solve the problems of high algorithm requirements, long decoupling time, unfavorable real-time force detection, etc., to achieve Ease of use, good adaptability, and reduced decoupling difficulty and time complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
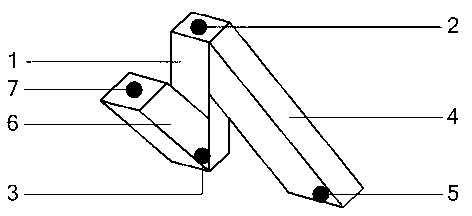
[0016] see figure 1 , the cylinders of this microstructure are all square cylinders, the first section of cylinder 1 is placed vertically, the center of its upper end surface has an electrical contact 2, the center of its lower end surface has an electrical contact 3, and the upper end surface of the second section of cylinder 4 It is inclined at 45° to its axis, and the end face is bonded to the upper part of one side of the first cylindrical body, so that the second cylindrical body 4 intersects with the first cylindrical body 1 to form a 45° connection, and there is an electrical contact 5 in the center of the lower end surface , the lower end surface is on the same plane as the lower end surface of the first columnar body. The lower end surface of the third section of the cylindrical body 6 is inclined at 45° to its axis, and the end surface is bonded to the lower part of the other side of the first section of the cylindrical body, so that the third section of the cylindri...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Cross-sectional area | aaaaa | aaaaa |
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More