Motion control system and motion control method for spherical robot with visual feedback
A technology of robot movement and spherical robot, which is applied in the field of robotics, can solve the problem of less visual positioning of spherical robots, and achieve the effects of ensuring stability, improving accuracy, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Specific embodiments of the present invention are described in more detail below with reference to the accompanying drawings.
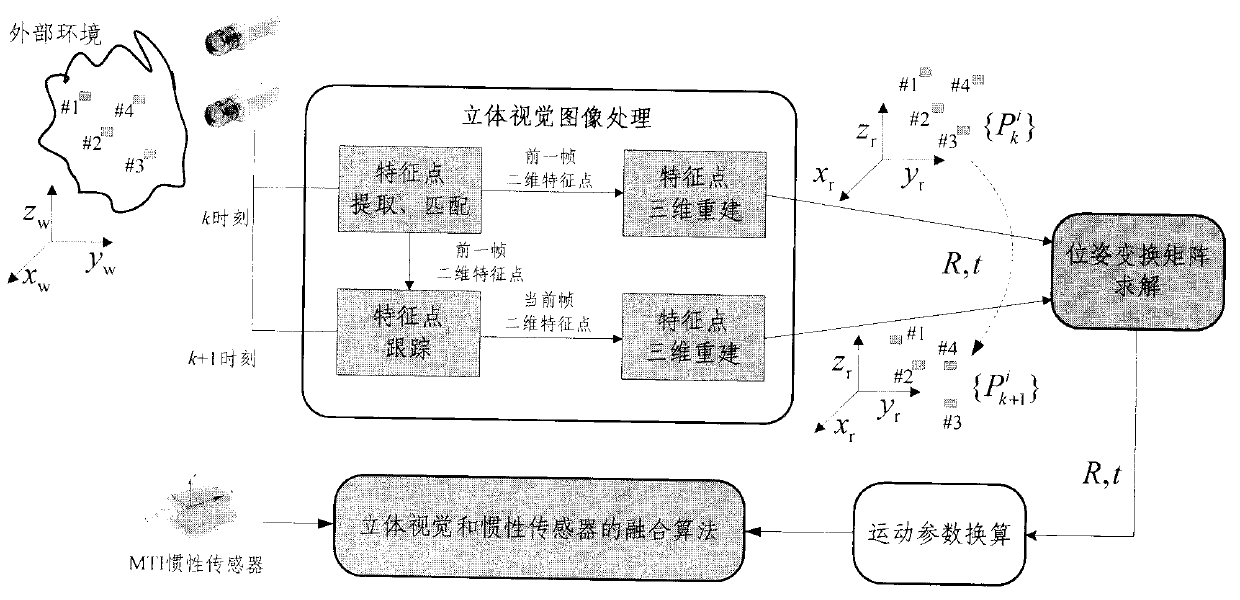
[0038] Such as figure 1Shown is the spherical robot motion control system with visual feedback according to the present invention. The system includes: a binocular vision system 1, a gyroscope 2, a spherical robot body 3, an embedded controller 4 and a wireless communication module 5. The motion control system coordinates the binocular vision system 1 and the gyroscope 2 for positioning, and measures the motion parameter information of the robot body 3 in real time, and inputs it to the embedded controller 4 as feedback. Control commands to realize the tracking of the target path, and at the same time, it can remotely monitor the status information of the robot and issue operation instructions through the wireless communication module.
[0039] The binocular vision system 1 consists of two CCD black-and-white cameras of the same model, which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More