

Real-time space target feature point tracking method suitable for space tethered robot
A space tether and space target technology, applied in the field of pattern recognition, can solve the problems of low detection accuracy, long detection time of SIFT algorithm, lack of adaptive update strategy of feature points, etc., to achieve high matching accuracy, easy implementation and application, The effect of high target positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
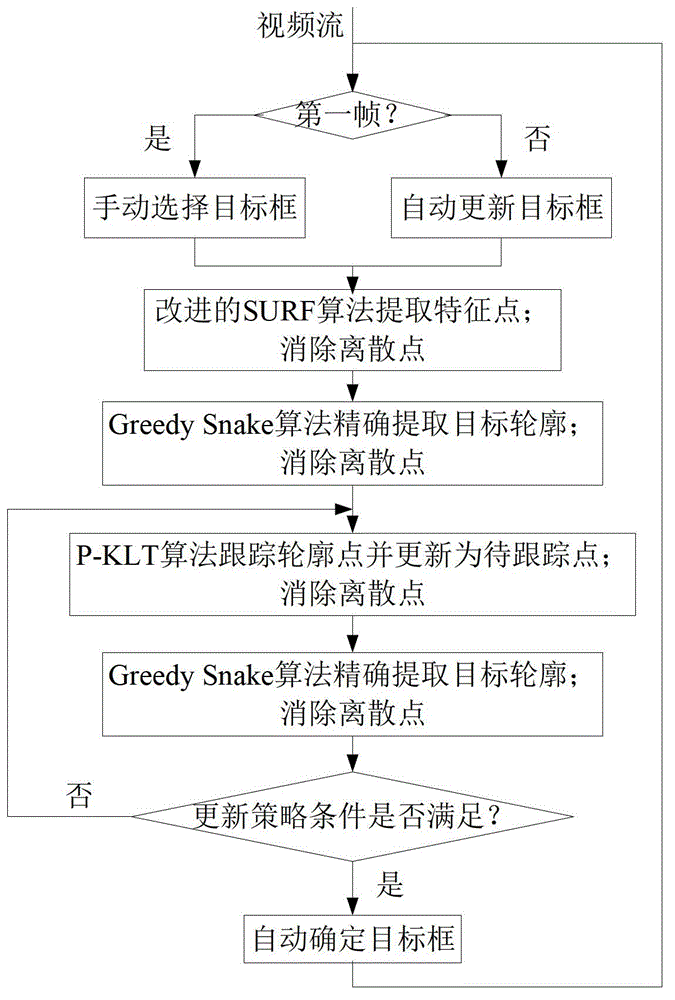
[0039] The embodiment of the present invention consists of five parts: feature point extraction algorithm, feature point matching algorithm, discrete point elimination, precise positioning and self-adaptive strategy. The overall flow chart is as follows figure 1 shown.
[0040] The hardware configuration required by the method of the present invention can be configured by a general household computer, and on the hardware of this configuration level, the method is realized by programming in C++ language. The key steps involved in the method of the present invention are described in detail one by one below, and the basic steps in the method of the present invention are the same, and the specific forms are as follows:
[0041] first step:
[0042] Video first frame image I 1 The target T to be tracked is marked with a rectangular area, and the four vertices are r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More