

Drive control method for all-electric car
A pure electric car and vehicle controller technology, applied in the field of car control, can solve problems such as division and non-consideration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention is described in detail below in conjunction with accompanying drawing:
[0072] Known prior art has following deficiency by foregoing description:
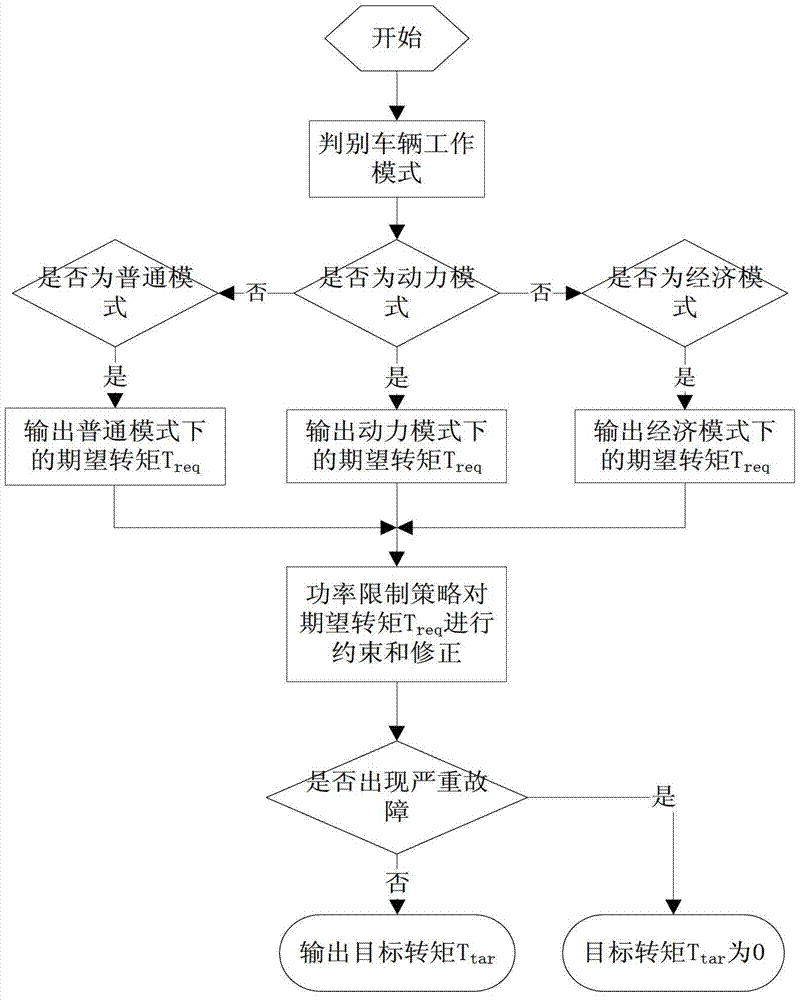
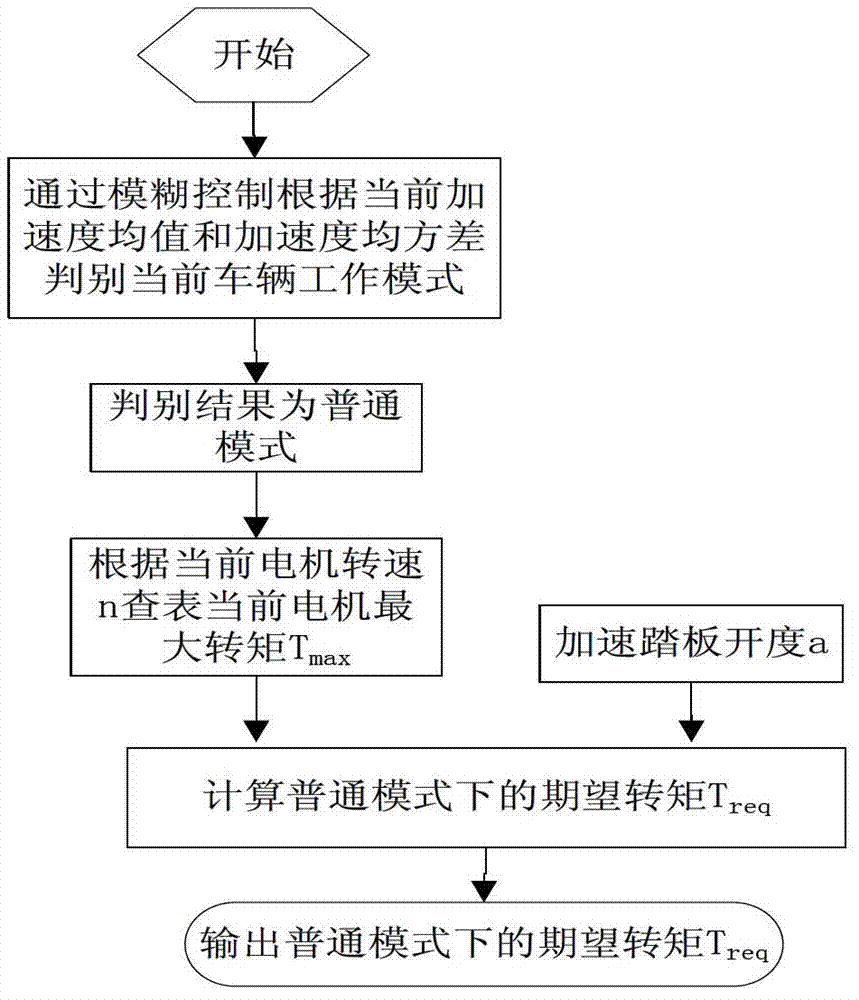
[0073] 1. It is not considered to ensure that the power and economy of the vehicle can be maximized in different modes by dividing the working modes when the vehicle is driving.
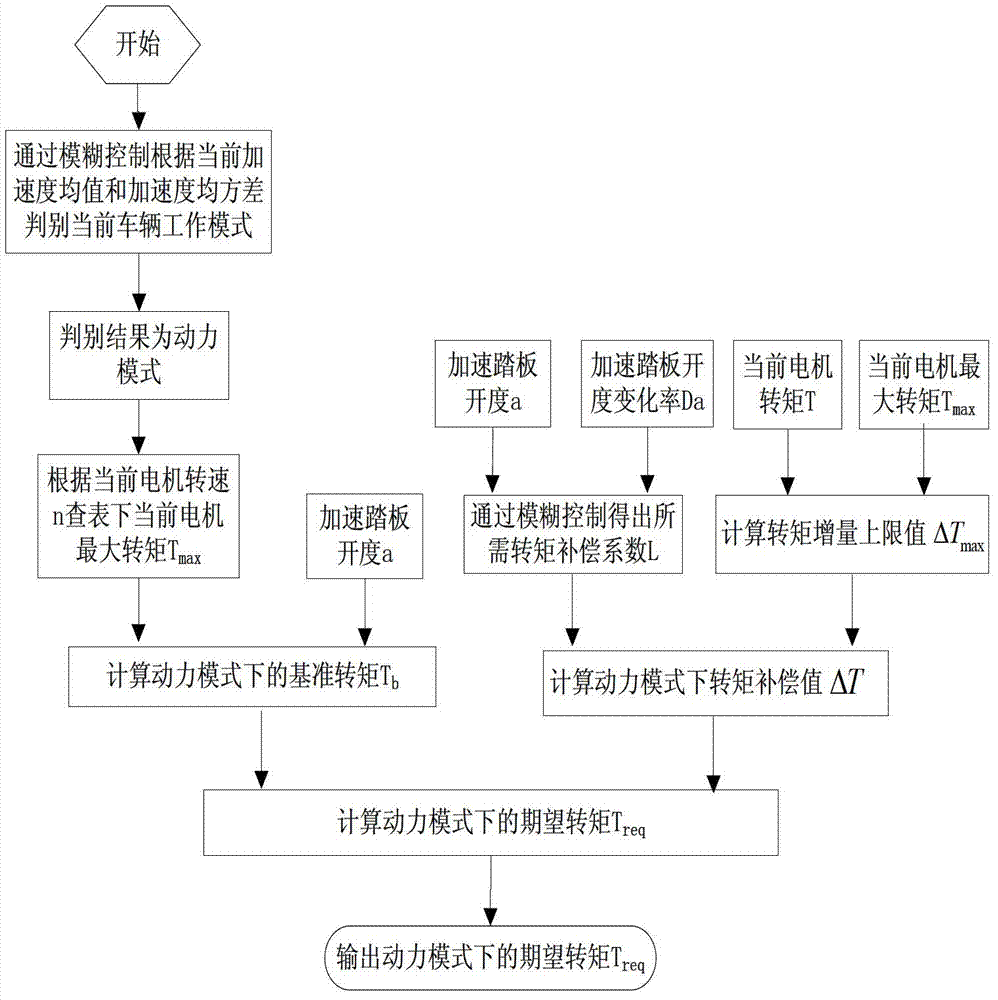
[0074] 2. Except when the accelerator pedal is pressed to the bottom, the torque compensation function is not considered during the driving of other vehicles, so the dynamic performance of the whole vehicle cannot be satisfied during the driving of other vehicles.
[0075] 3. The formulation of the target torque does not consider improving the combined efficiency of power components, so the vehicle economy has not been greatly improved.
[0076] In order to overcome the deficiencies of the above-mentioned prior art, the present invention proposes a driving control method for pure electric cars. The driving control method for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More