

Pipe exploration robot based on real-time image transmission system
A transmission system and real-time image technology, applied in the field of visual robots, can solve the problems of low adaptability of pipeline diameter, inability to adapt to pipeline diameter, resource loss, etc., and achieve important regular inspection and detection, compact front and rear structure distribution, high operation effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] combine Figure 5 A pipeline detection robot of the present invention includes two parts: a mechanical control system and an image transmission system. The image transmission system is located on the mechanical control system. The mechanical control system includes three parts: a motor system, a worm gear system and a drive control circuit system. The drive control circuit system controls the operation of the motor system, and the motor system provides power for the worm gear system;
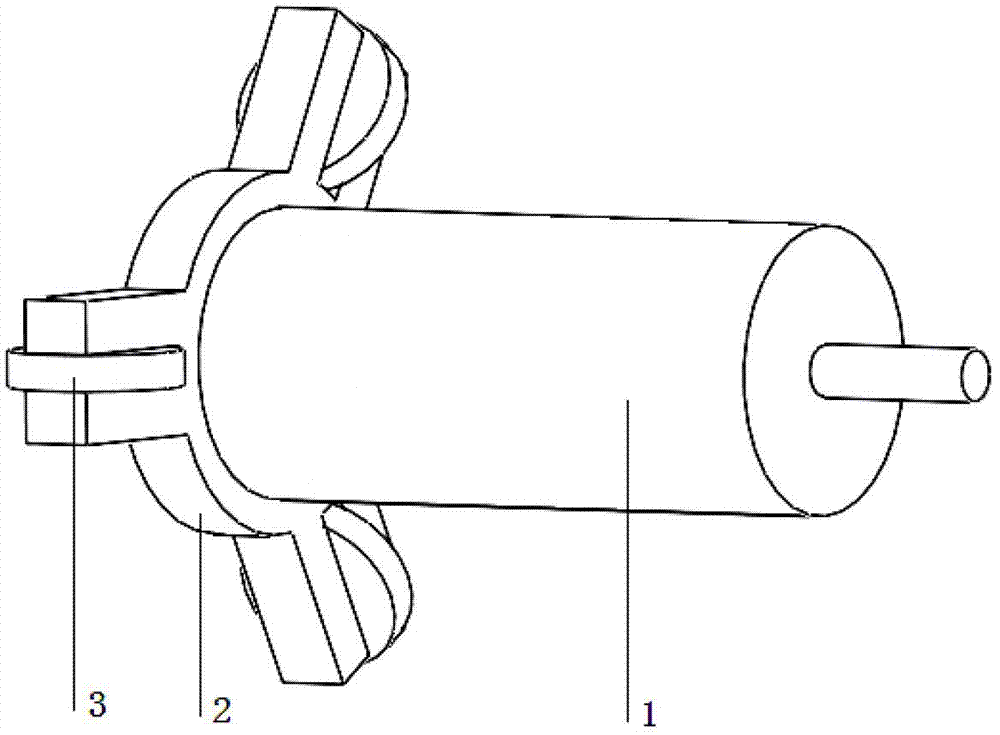
[0017] combine figure 1 , the motor system includes a motor, a motor casing 1, a driven wheel bracket 2, and a driven wheel 3, wherein the number of driven wheels 3 is three, and the three driven wheels 3 are evenly distributed on the driven wheel bracket 2 of the motor casing 1, A motor is arranged inside the motor housing 1;
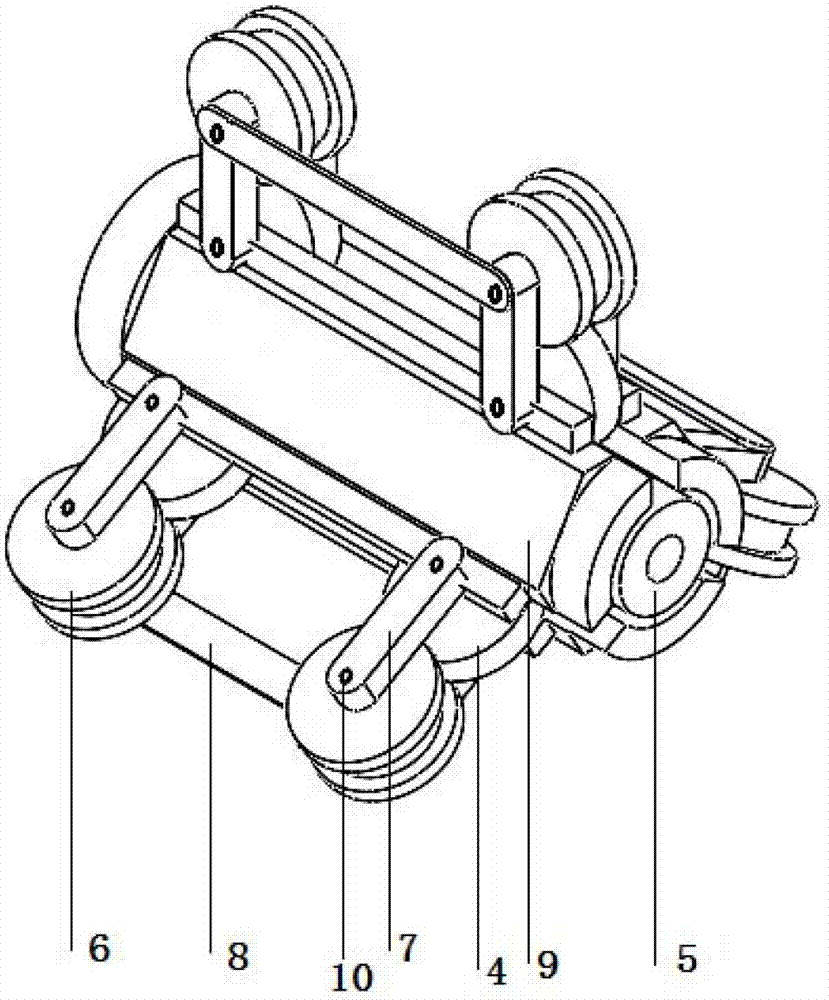
[0018] combine figure 2 , the worm gear system includes a worm gear 4, a worm screw 5, a driving wheel 6, a reducing rod 7, a connecting rod 8, a metal casing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More