

Two-wheel differential wheel type mobile robot experimental platform with adjustable gravity center
A technology for mobile robots and the position of the center of gravity, which is applied to the testing of machines/structural components, instruments, and measuring devices. Ease of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
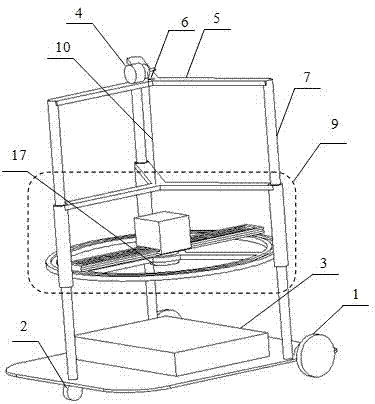
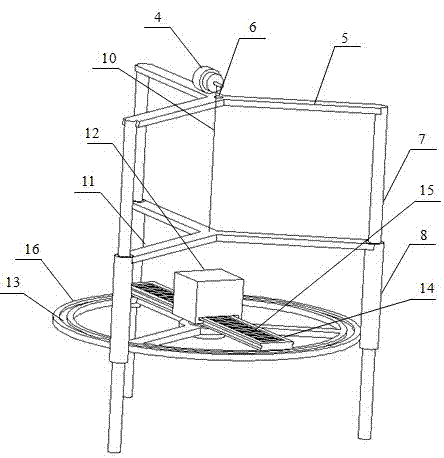
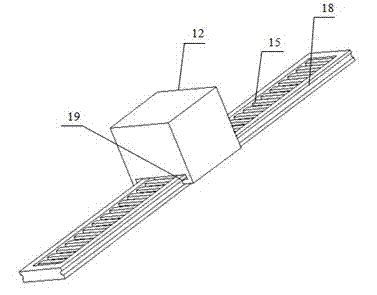
[0031] In specific implementation, such as Figure 1-Figure 3As shown, a two-wheeled differential wheeled mobile robot experimental platform with adjustable center of gravity position includes a bottom plate, a drive system is arranged on the bottom plate, three support rods 7 are evenly distributed on the bottom plate direction, and the tops of the three support rods 7 are respectively A horizontal bar 5 that extends laterally toward the middle and is handed over and fixed as a whole is provided. A lifting mechanism is arranged in the middle of the cross bar 5. A two-dimensional platform is arranged in the middle of the pole, and a counterweight 12 is arranged on the two-dimensional platform. For the two-dimensional motion mechanism that drives the counterweight 12 to move along the horizontal plane of the two-dimensional platform, the lifting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More