

Method of underground scooptram autonomous travel, obstacle avoidance motion control and target path planning
A target path and autonomous driving technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the difficulty in planning the target path of the underground roadway, the increase in the amount of data of the target path stored by the autonomous driving controller, and the lack of solutions, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0034] The preferred embodiment of the autonomous driving and obstacle avoidance motion control and target path planning method of the underground scraper of the present invention is:
[0035] Used to control the main target path and the local obstacle avoidance target path planned by the underground scraper tracking, the method includes the following main steps:
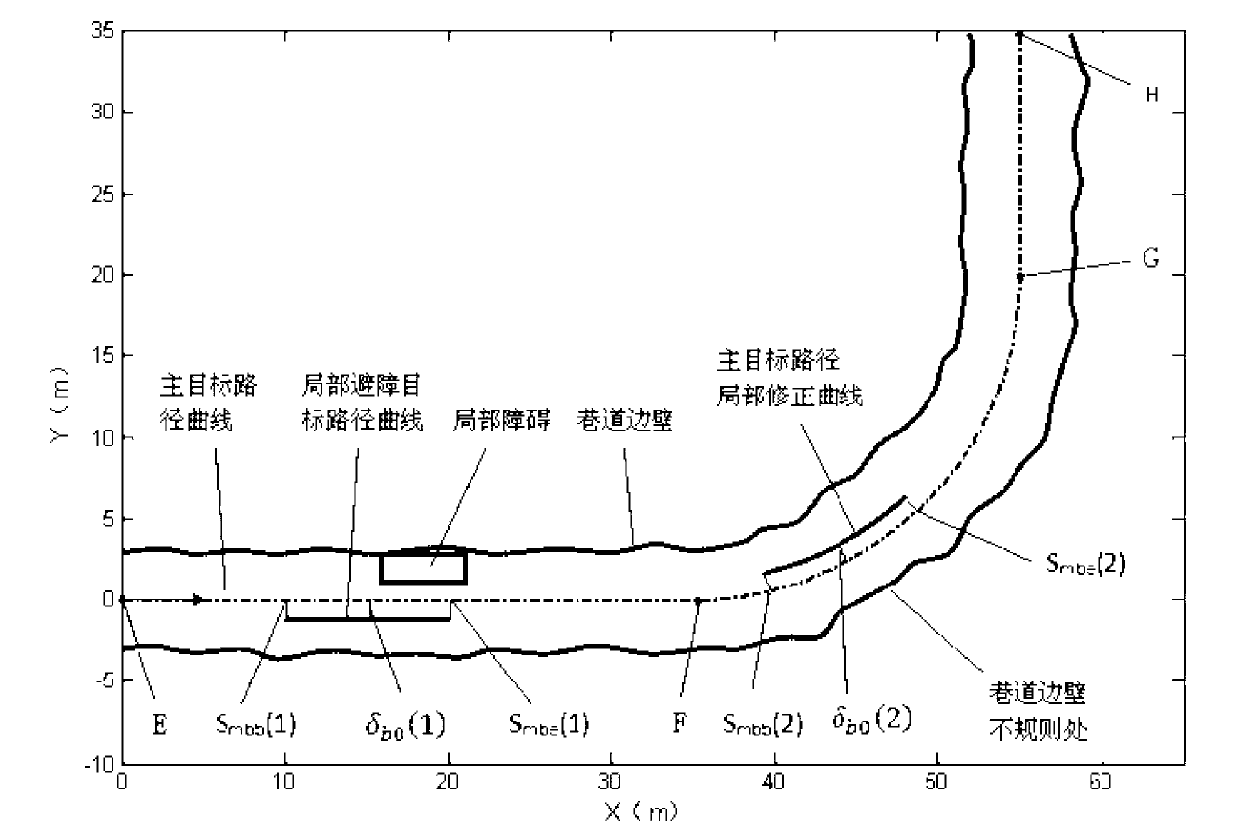
[0036] A. Plan the main target path and local obstacle avoidance target path of the underground LHD according to the conditions of the underground roadway. m (k) store the main target path curvature K m (k) series of values, arc length s along the main target path curve m (k) Store the starting point s of the local obstacle avoidance target path mbb (i) and termination point s mbe (i) and the lateral deviation displacement δ of the local obstacle avoidance target path relative to the main target path b0 (i), the main target path and the local obstacle avoidance target path are stored in the storage medium of the...
specific Embodiment
[0085] In this embodiment, the KCY-2YK underground scraper is taken as the control object, and the autonomous driving and obstacle avoidance motion control of the underground scraper is carried out, as well as the main target path and local obstacle avoidance target path planning. The specific implementation steps are as follows:
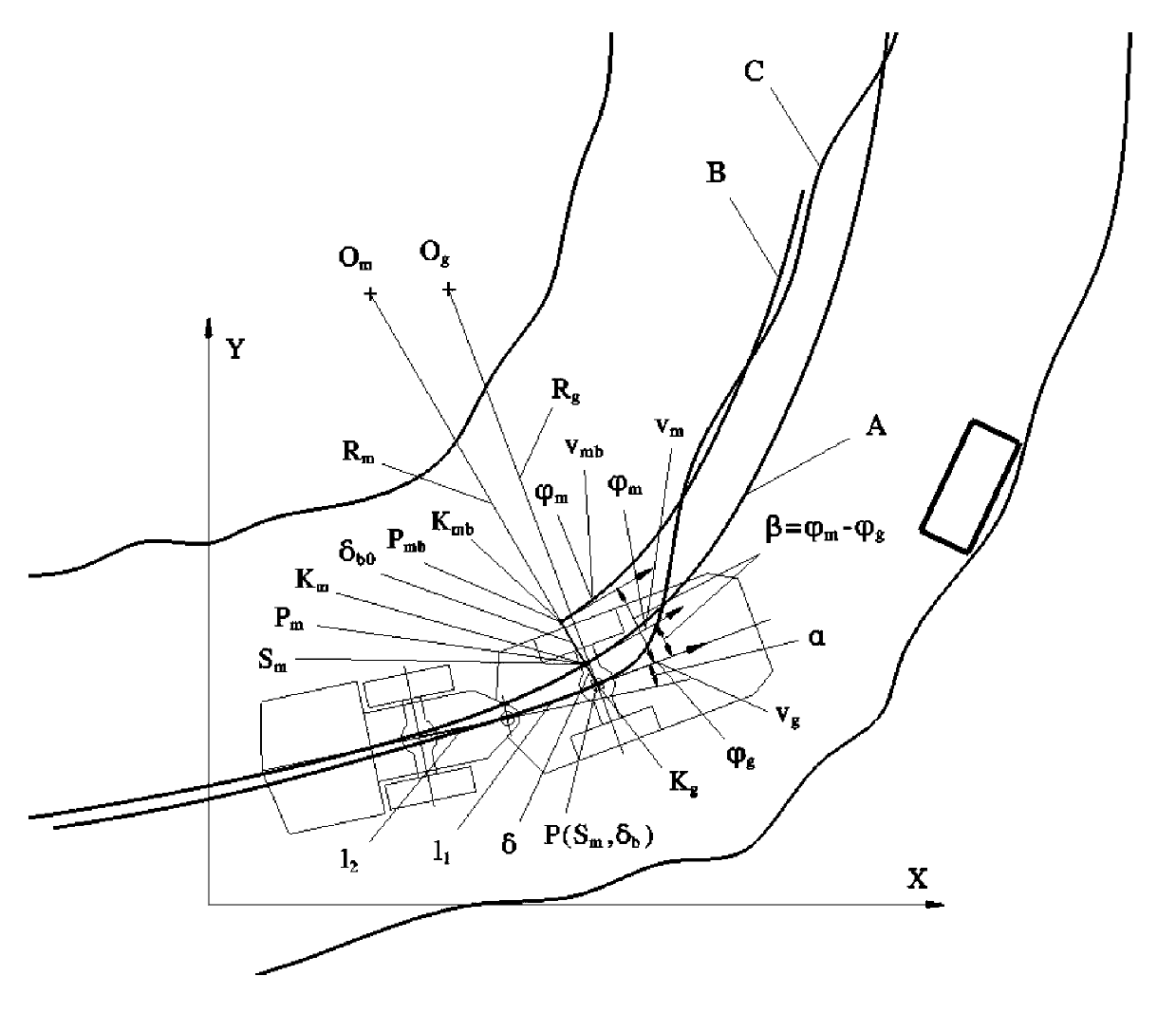
[0086] The invention firstly defines the relevant parameters needed for the motion control of the underground scraper, and deduces a group of equations reflecting the relationship of the parameters. The schematic diagram of the main target path, local obstacle avoidance target path, tracking trajectory and related parameters of the underground LHD in the roadway is shown in figure 1 . The X-Y coordinate system is established with the road surface as the coordinate plane, the midpoint of the driving axle in front of the LHD is selected as the positioning reference point of the LHD, and the projection point P of this point on the X-Y coordinate plane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More