

Foot end mechanism of robot
A robot and foot-end technology, applied in the field of robots, can solve the problems of poor adaptability and less degrees of freedom, and achieve the effects of reducing impact, improving stability, and increasing friction performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
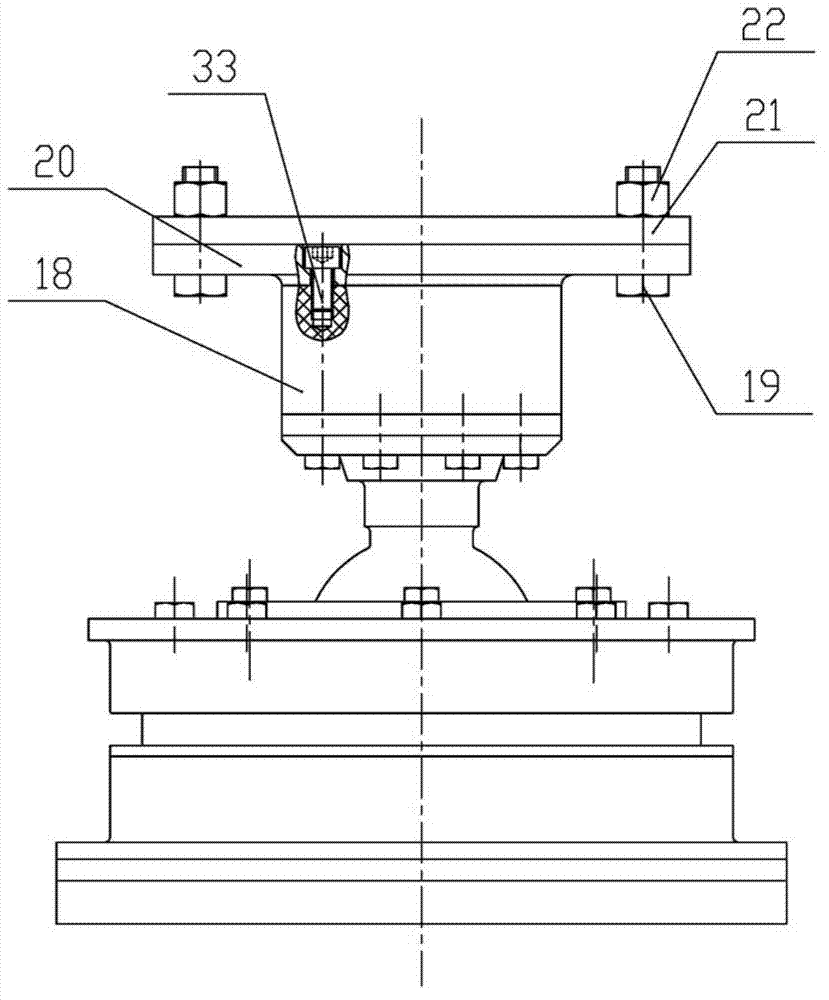
[0010] The specific implementation manner of the present invention is described in detail in conjunction with accompanying drawing and technical scheme: figure 2 is the appearance diagram of the foot end mechanism, figure 2 The middle adapter plate 20 and the three-way load cell 18 are fixedly connected by eight uniformly distributed screws 33 in the ring, and four adapter plate connecting bolts 19 and four nuts 22 are used to connect the adapter plate 20 to the leg end flange 21. connect. The leg mechanism above the leg end flange 21 is used as a source of power to drive the foot end mechanism to move in all directions, and the foot end mechanism for different purposes can be replaced to ensure that the leg mechanism is not disturbed, realizing modularization design.
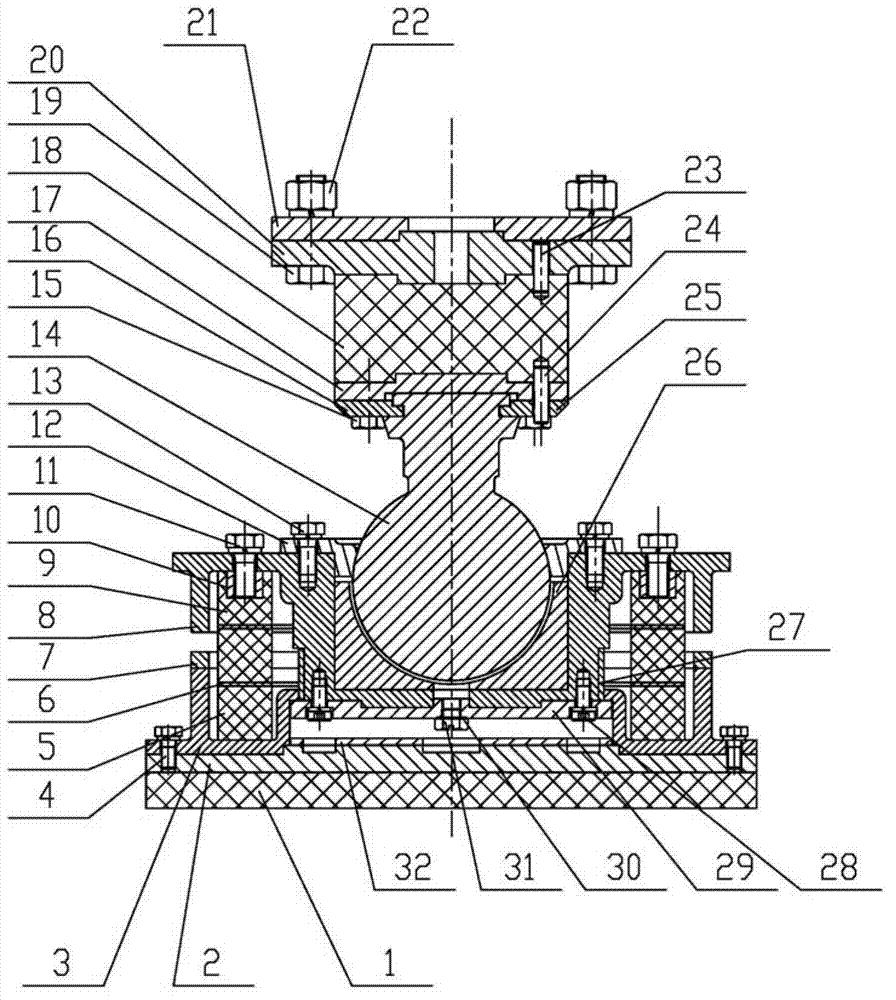
[0011] attached figure 1It is a structural cross-sectional view of the foot-end mechanism, which is composed of the foot-end mechanical part and the force-measuring part, wherein the ball head rod 14 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More