

Detecting and tracking method for lane lines of autonomous vehicle navigation
A technology of lane line detection and autonomous navigation, applied in the field of lane line detection and tracking of vehicle autonomous navigation, can solve the problems of slow detection speed, increase in calculation amount, increase the time of lane line detection, etc., to achieve high accuracy and improve quality , reducing the effect of shadows or other noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
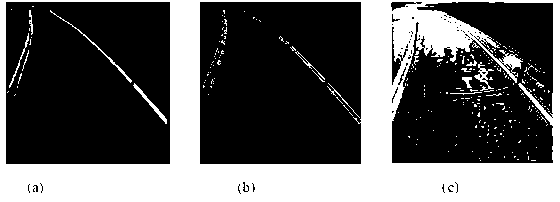
[0048] The method of the present invention includes four stages: fuzzy connection processing, edge detection and refinement, Vector Lane algorithm and non-uniform B-spline interpolation.
[0049] Convention: I refers to the processed video frame image; m and n respectively represent the number of rows and columns of the image; the array f(o,p) stores the fuzzy connection degree of each pixel p in the image I relative to the seed point o ; Queue Q is used to store the pixel value of the fuzzy connectivity to be calculated; T is the larger value set for extraction, used for comparison and judgment; DELETE_ANGLE is the threshold, used for the angle value selection operation in Vector Lane.
[0050] The specific steps are as figure 1 Shown:
[0051] Convention: I refers to the processed video frame image; m and n respectively represent the number of rows and columns of the image; the array f(o,p) stores the fuzzy connection degree of each pixel p in the image I relative to the seed point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More