

Automatic feeding and discharging mechanism of engraving and milling machine and feeding and discharging method
A technology of automatic loading and unloading, fine carving machine, applied in the field of fine carving machine, to achieve the effect of reasonable structure design, high efficiency and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
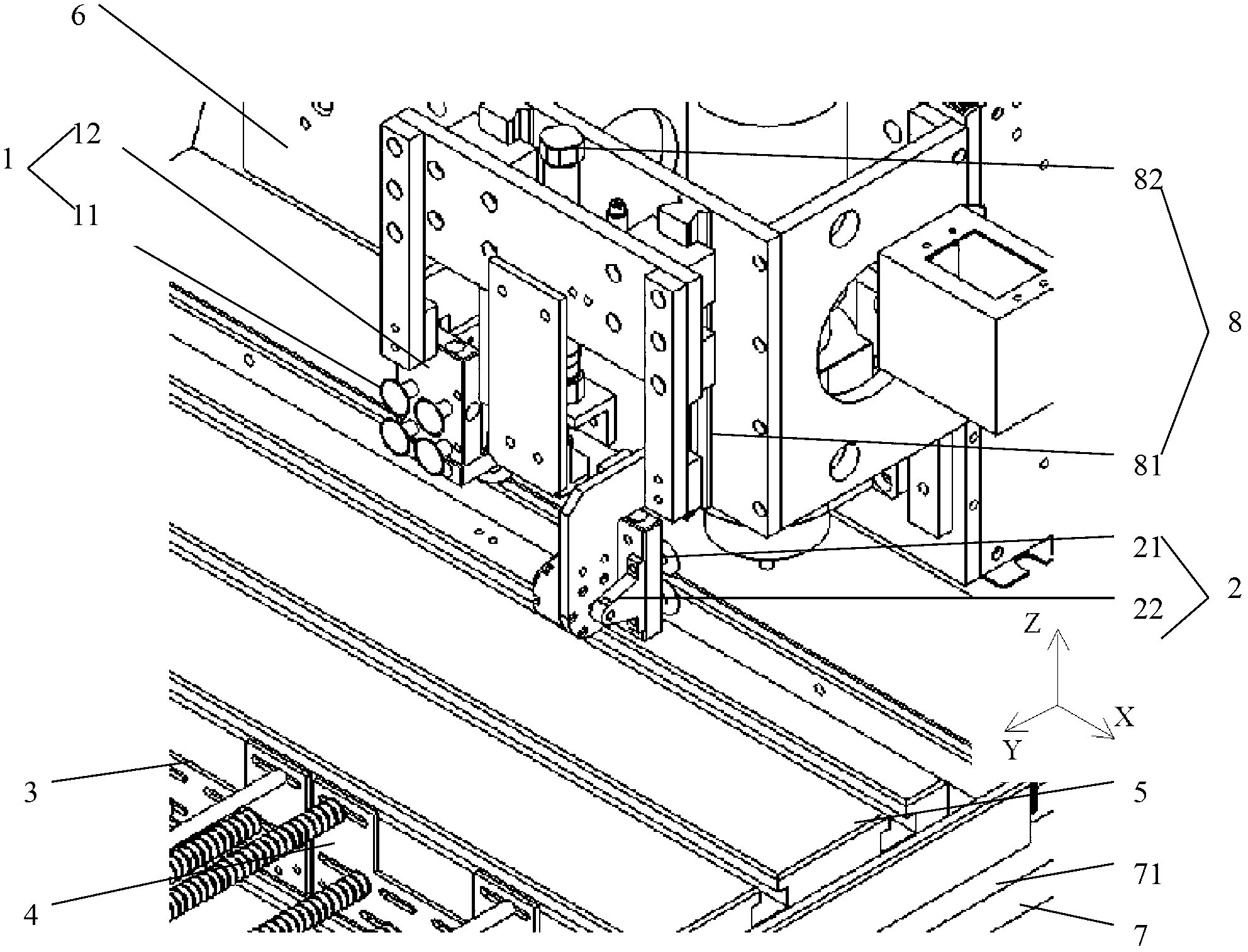
[0029] like figure 1 An automatic loading and unloading mechanism of the engraving machine shown in Embodiment 1, including a retrieving component 1, a discharging component 2, a loading frame 3, a unloading frame 4, a positioning fixture, a workbench 5, and an X-axis displacement structure 6 , Y-axis displacement structure 7 and Z-axis displacement structure 8. The loading frame 3 and the blanking frame 4 are placed side by side on the workbench 5, the positioning jig is placed on the workbench, and the positioning jig is located on one side of the loading frame and the unloading frame; the Z-axis displacement structure 8 is set on the X axis displacement structure 6, and the Z-axis displacement structure 8 is displaced along the X-axis direction; the reclaiming assembly 1 and the discharging assembly 2 are arranged on the Z-axis displacement structure 8, and the reclaiming assembly 1 and the discharging assembly 2 are arranged along the Z-axis Axial displacement; the workbe...
Embodiment 2
[0038] Embodiment 2 discloses the loading and unloading method used in Embodiment 1, including:
[0039] a. Both the loading frame 3 and the blanking frame 4 are installed on the workbench 5, and the distance between the loading frame 3 and the blanking frame 4 is adjusted so that the distance is the same as the distance between the feeding assembly 1 and the discharging assembly 2 basically the same;
[0040] b. When starting processing, the glass to be processed is installed in the loading frame 3, the blanking frame 4 is an empty box, and the workbench 5 moves back and forth along the Y axis with the loading frame 3; the suction cup 11 moves along the X axis. The axial direction moves to the position matched with the loading frame 3; at the same time, the retrieving suction cup 11 turns over 90 degrees and faces the workbench 5, and the Z-axis driving device 82 starts to work at the position where the first piece of glass is expected to be taken, so that the retrieving suct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More