

Medicine bottle foreign matter detection method based on medical visual detection robot image correction
A technology for visual inspection and image correction, applied in image enhancement, image data processing, instruments, etc., can solve the problems of low foreign object detection accuracy, correction and matching of medicine bottles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be further described below in conjunction with the accompanying drawings.
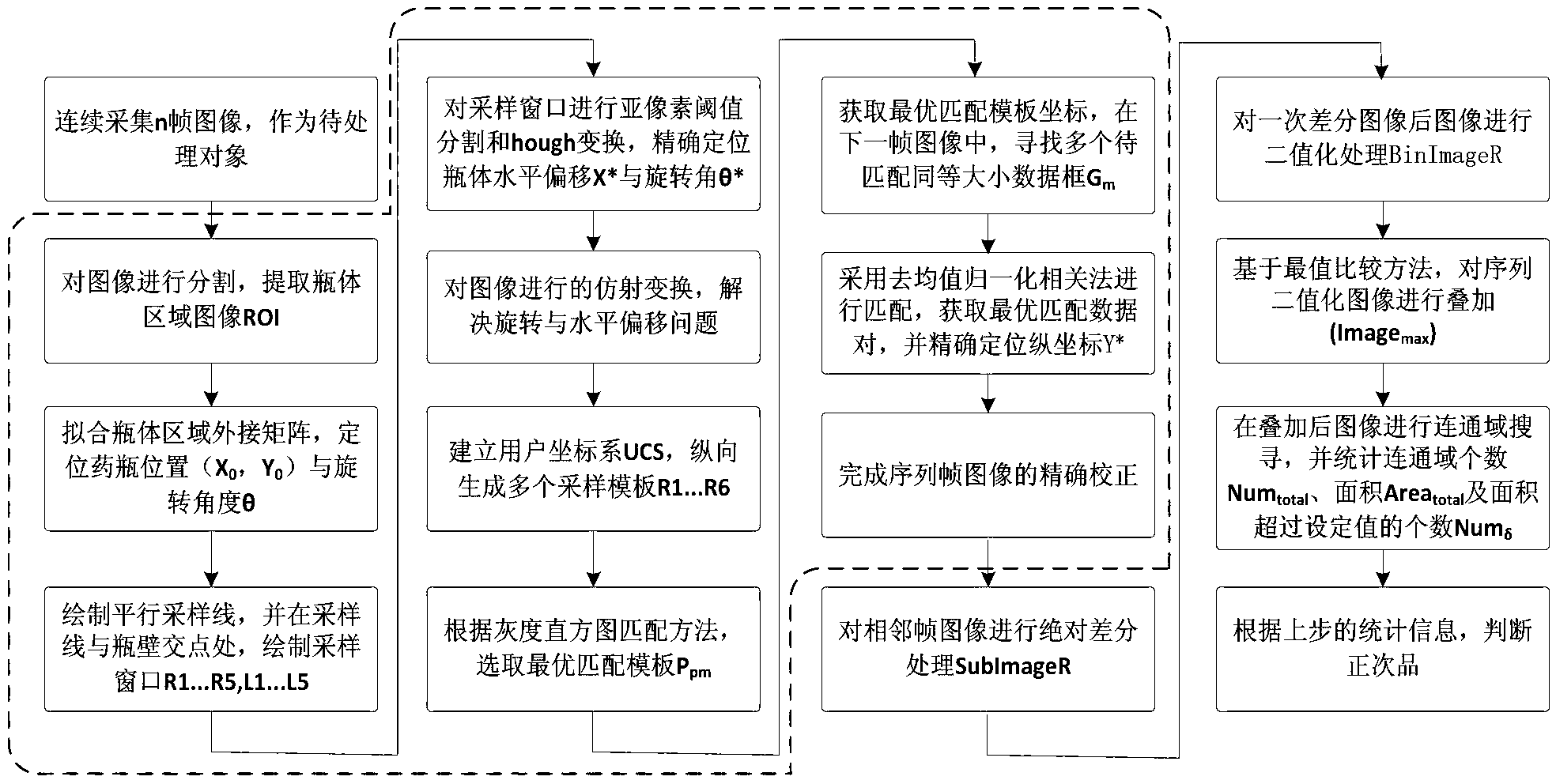
[0089] Such as figure 1 As shown, it is a flow chart of the present invention, a method for detecting foreign objects in medicine bottles based on image correction of medical vision detection robots. The output size requirement is 50um, that is, foreign objects exceeding 50um need to be detected, including the following steps:
[0090] Step 1: Image acquisition;
[0091] Continuously collect N frames of medical sequence images Image={Image 0 , Image 1 …Image N-1};
[0092] Among them, the number of frames N to be collected is determined according to the actual needs in the detection process of medical foreign matter; the acquisition mode is a single-trigger acquisition of multiple frames, and the image information of the high-speed rotation period of the foreign matter is collected intensively.
[0093] Step 2: Preprocessing the sequence images to obtain the regi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More