

Upper limb rehabilitation robot
A technology for rehabilitation robots and upper limbs, applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc., can solve the problems of inconvenience for patients, complex structure, relatively high requirements for control methods and safety, and achieve good rehabilitation Effect, easy to wear, safe and reliable to wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
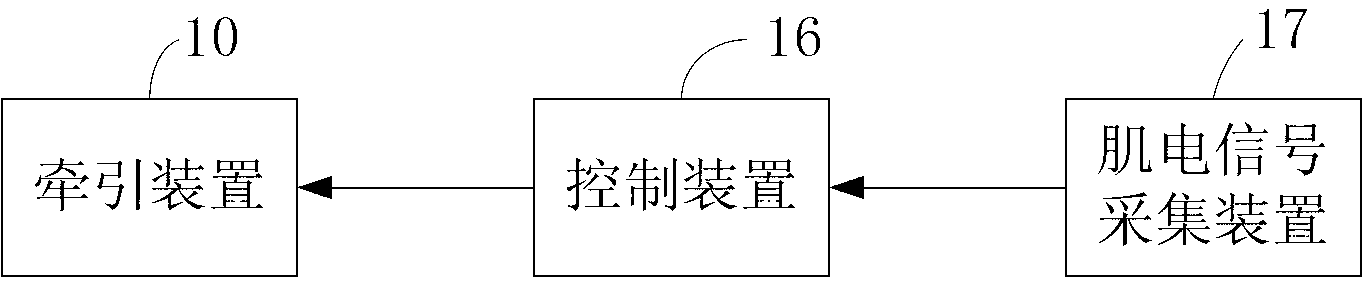
[0036] As the third embodiment of the upper limb robot of the present invention: as Figure 5 As shown, the upper limb rehabilitation robot also includes a training mode selection device 20, a storage device 18 storing a rehabilitation training program and a parameter selection device 19 for selecting parameters for the patient, and the training mode includes an active control mode and a passive control mode, The two control methods can be switched to each other. The control device 16 selects according to the training method selected by the patient whether to control the angle and strength of the traction device 10 to pull the rope 6 according to the myoelectric signal collected by the myoelectric signal collection device 17, or to control the angle and strength of the rope 6 pulled by the traction device 10, or to transmit the rope 6 according to the parameter selection device 19. Parameters and the stored rehabilitation training program in the storage device 18 control the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More