

Series-parallel combined mechanism for guiding object to rotate around virtual center
A technology of hybrid mechanism and series mechanism, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of easy implementation, simple structure and less degree of freedom of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
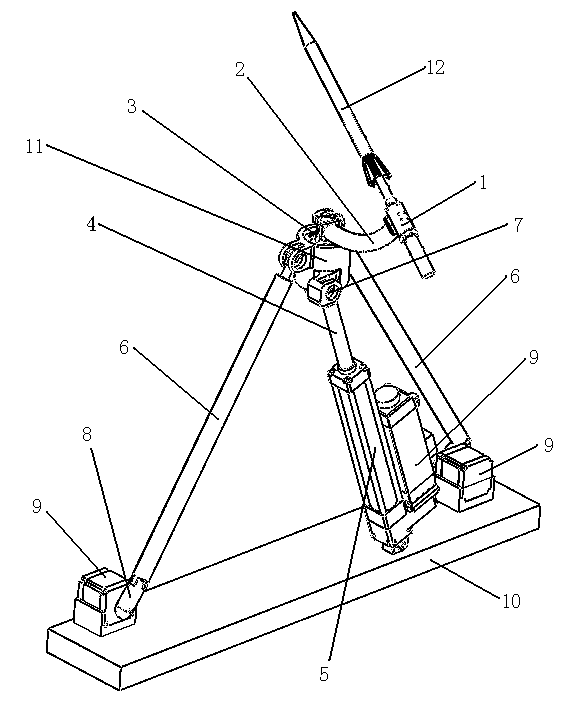
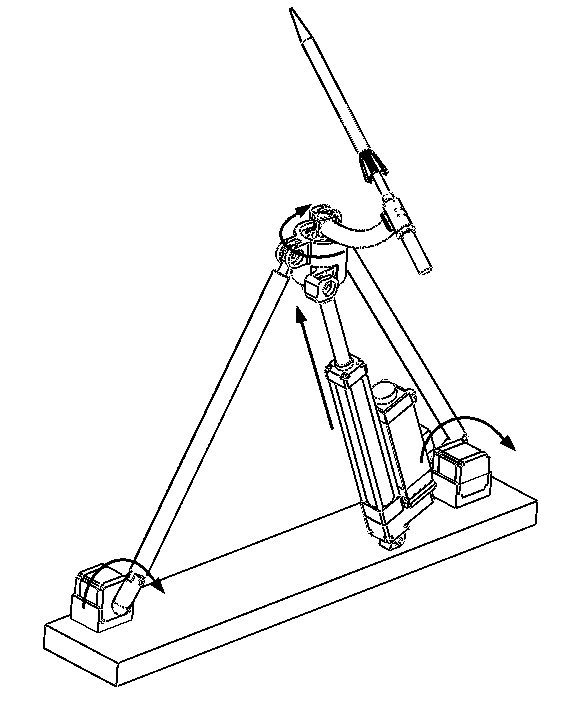
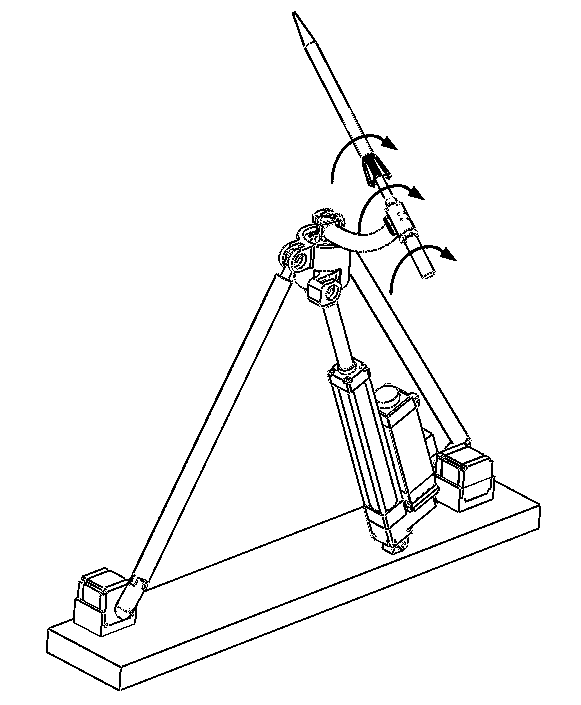
[0031] Such as figure 2 , 3 , 4, 5, and 6, a hybrid mechanism that guides objects to rotate around a virtual center includes a parallel mechanism and a series mechanism.
[0032]The parallel mechanism includes a fixed platform 10 arranged horizontally and a moving platform 11 above the fixed platform 10, and three branch chains arranged side by side are arranged between the fixed platform 10 and the moving platform 11. One of the branch chains includes a driving rod 4, a servo motor 9, and an electric cylinder 5. The driving rod 4 is arranged obliquely and the two ends of the driving rod are respectively connected to the moving platform 11 and the fixed platform 10 through a single-degree-of-freedom rotating joint 7, and the servo motor 9 drives the electric cylinder. The cylinder 5 realizes the expansion and contraction of the drive rod 4 . The other two branch chains have the same structure and the two branch chains are respectively arranged on both sides of the drive rod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More