

Movement speed control method for cable-driven camera robot
A movement speed and control method technology, applied in the field of machinery, can solve the problems such as the change of the moving speed of the camera, the shock and movement instability, and the lack of effective control of the moving speed, which can overcome the sudden change of the speed and the stable movement speed. Controllable and simple control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
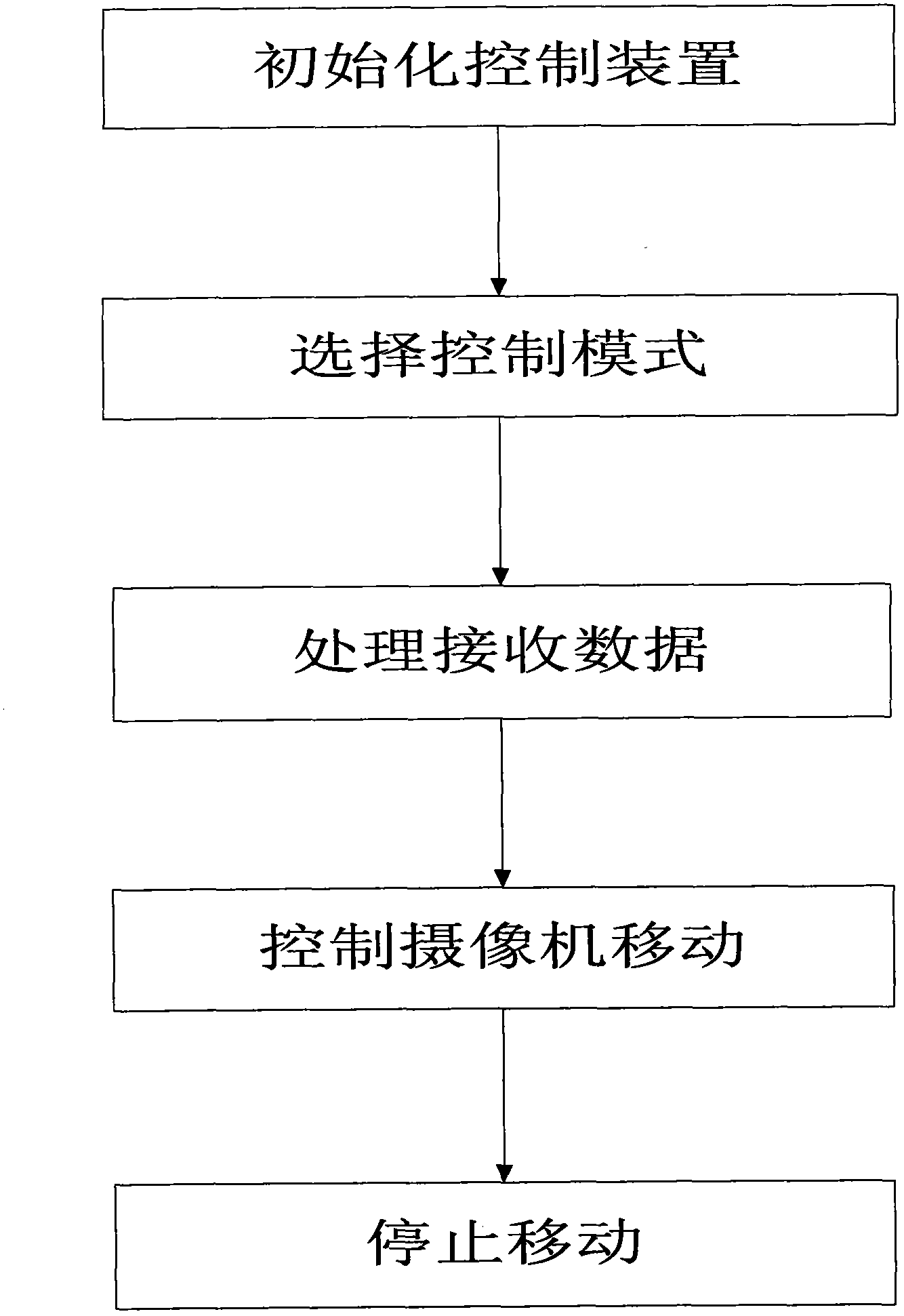
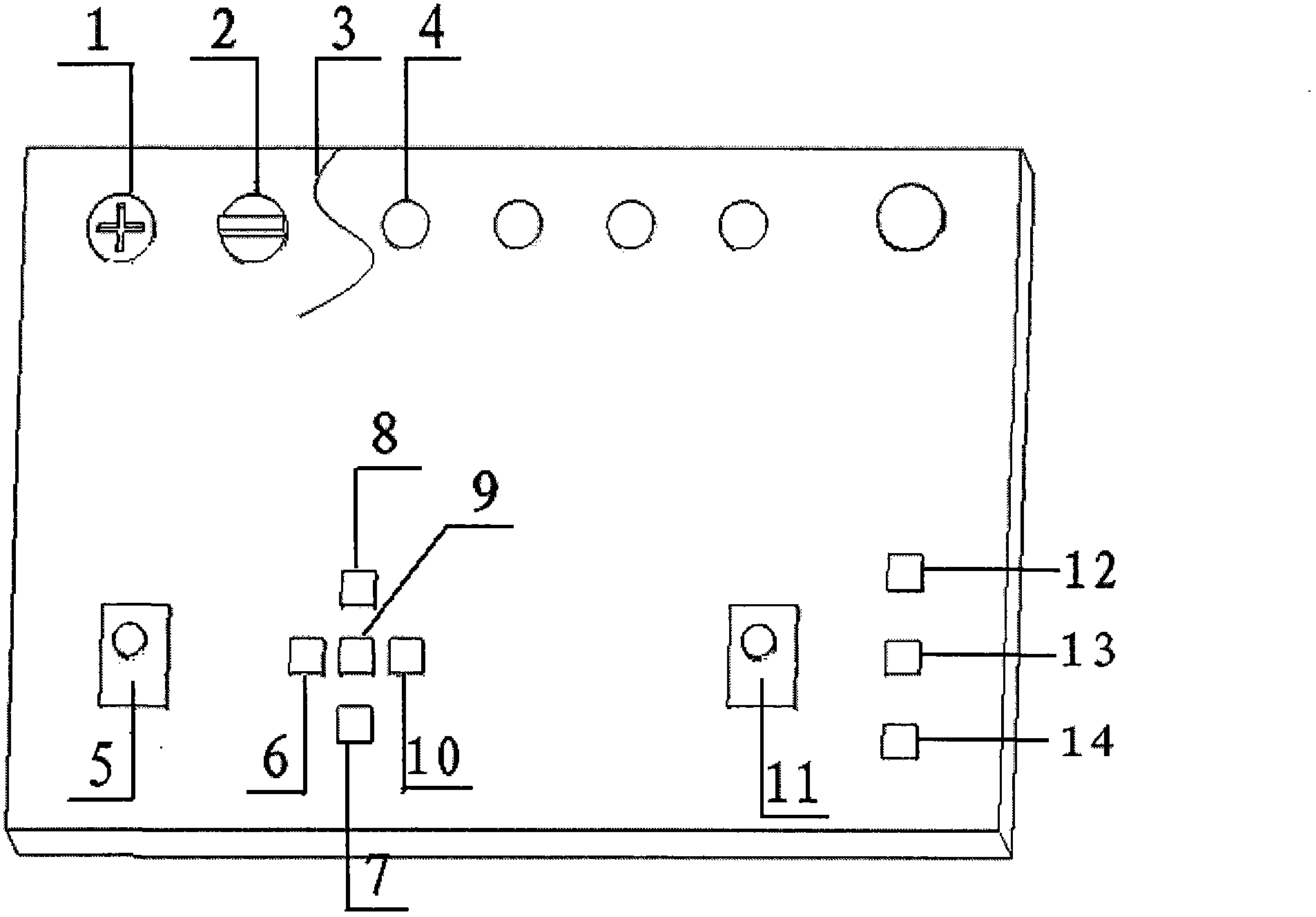
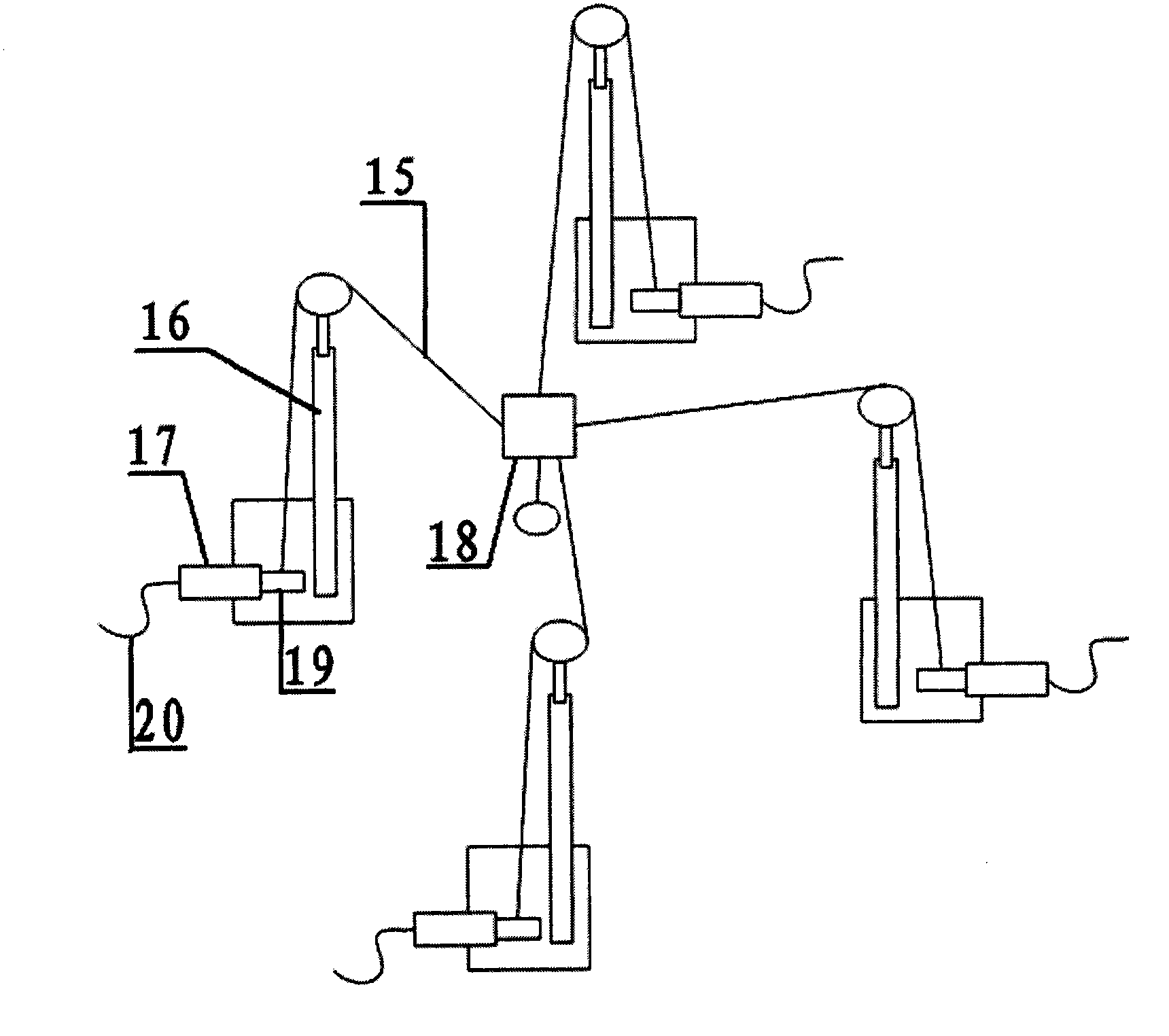
[0028] In the invention, the camera robot is pulled by the cable control device to realize three-dimensional movement in space. The device is mainly composed of a user control cabinet, a PC and an actuator. The control cabinet is connected with the PC, which is used to send the speed vector generated by the user when shaking the direction handle or pressing the jog button to the PC; the PC is connected with the actuator, and the PC converts the speed vector sent by the control cabinet into The execution command of the actuator is sent to the actuator, and the actuator controls the camera robot to move at the specified speed and direction.
[0029] The camera robot in the present invention has two control modes: jog control mode and handle control mode. Select the jog or handle control mode according to the control speed requirements; if you choose the jog control mode, then switch the control mode knob to the jog control mode. In this mode, the moving speed of the camera robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More