

Hybrid navigation belt based mobile robot positioning system and method thereof
A mobile robot and hybrid navigation technology, which is applied in two-dimensional position/channel control and other directions, can solve the problems of large operating error, unreadable, low precision, etc., to improve accuracy and reliability, improve effectiveness, and ensure real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
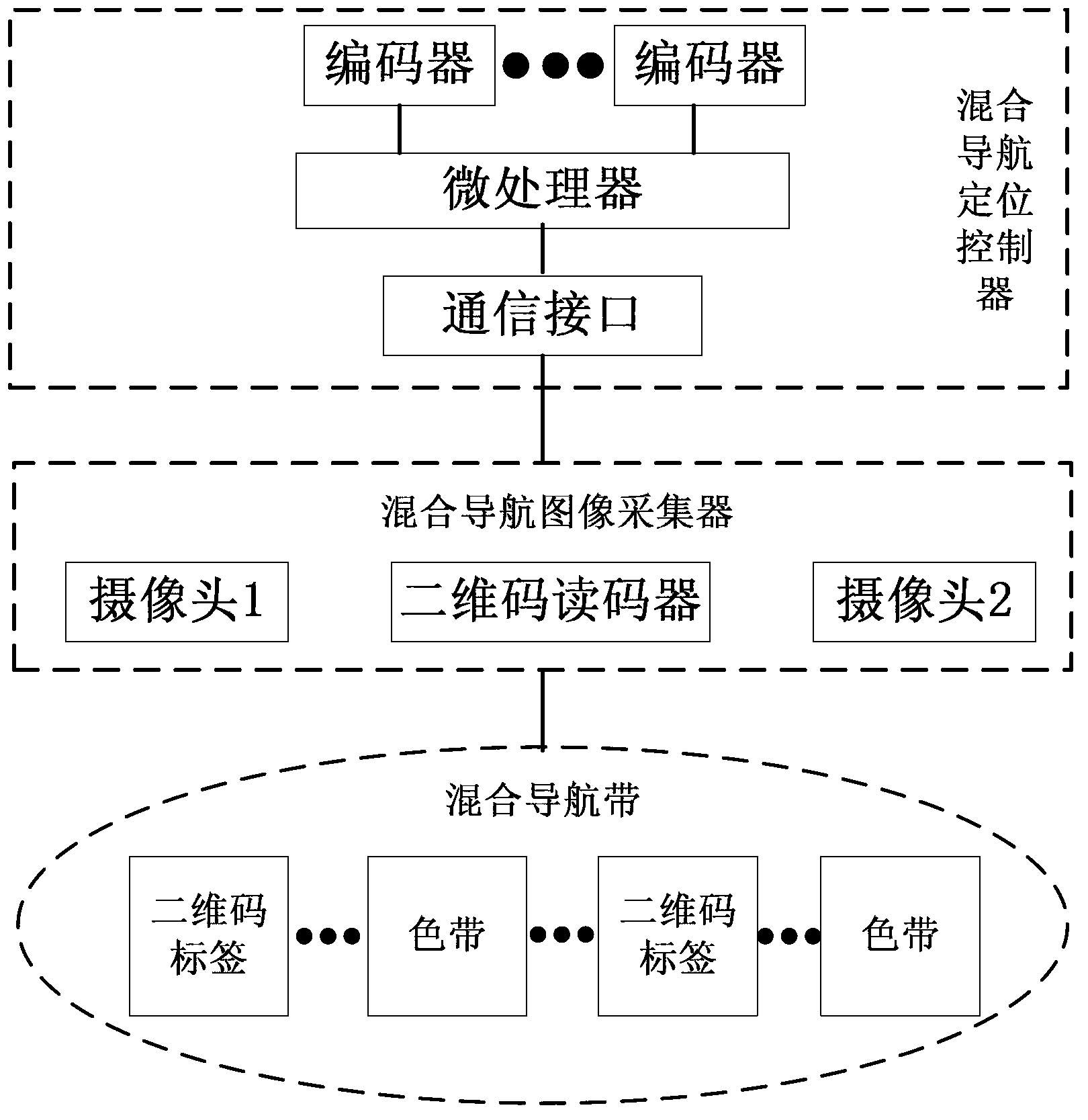
[0053] A mobile robot positioning system based on a hybrid navigation belt, such as figure 1 As shown, it includes a hybrid navigation and positioning controller installed on a mobile robot car, a hybrid navigation image collector and a hybrid navigation belt distributed on the ground, and the hybrid navigation and positioning controller is composed of a microprocessor, an encoder and a communication interface Connection structure, the microprocessor is connected with the encoder to detect the running speed of the mobile robot, the microprocessor is connected with the hybrid navigation image collector through the communication interface, and the microprocessor controls the hybrid navigation image collector through the communication interface. The image collection of the mixed navigation belt, receiving the image on the mixed navigation belt and rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More