

Multiple-heterogeneous robot cooperation method based on middleware
A multi-robot, robot technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problem of cooperation without heterogeneous robots, and achieve the effect of improving reusability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be described in further detail below in conjunction with the accompanying drawings.
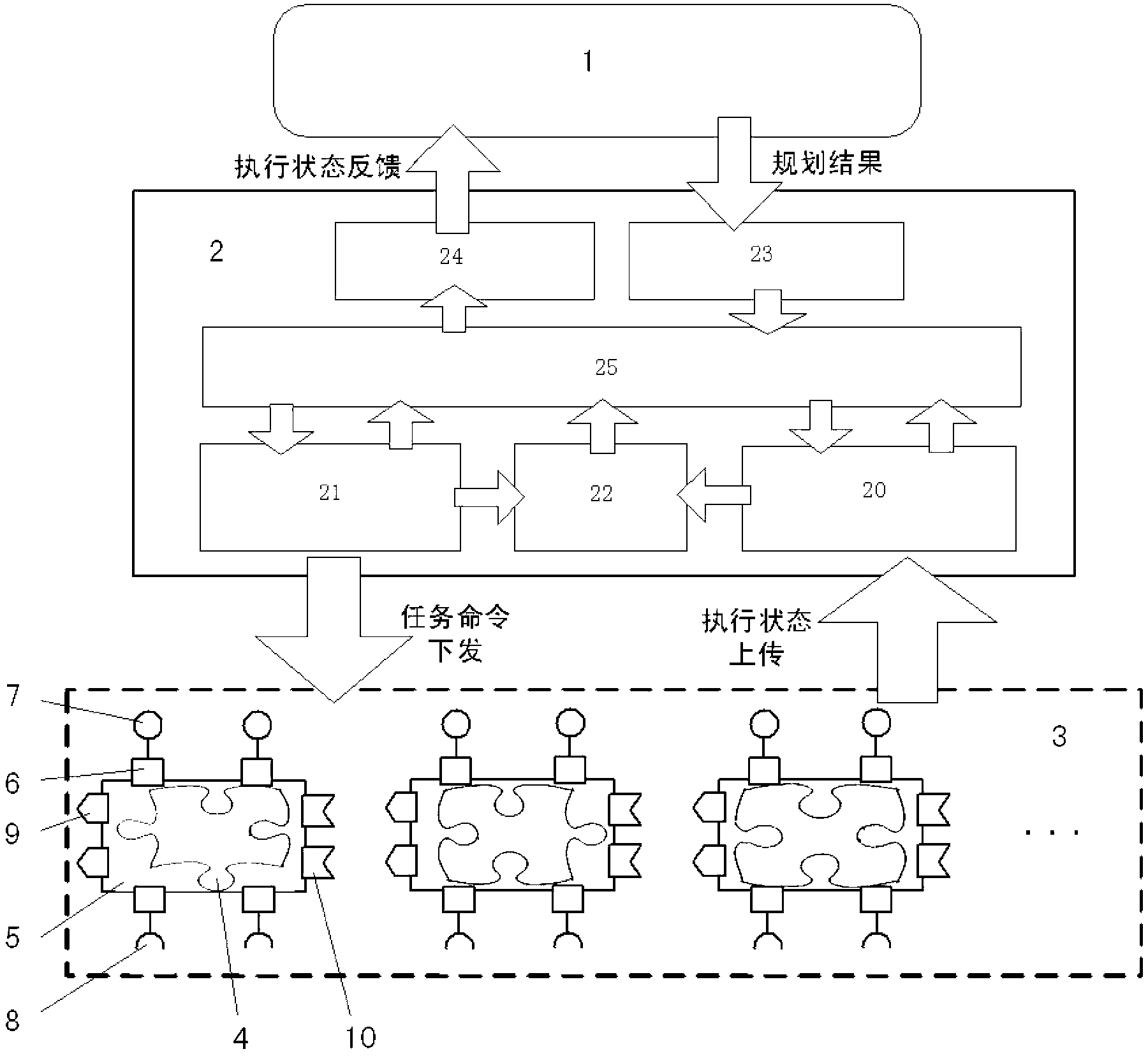
[0026] The overall structure of the present invention is as figure 1 As shown, it consists of three parts: mission planner 1 , robot manager 2 and multi-heterogeneous robot system 3 .
[0027] The user sends instructions through the man-machine interface, and the task planner 1 converts the user's abstract instructions into a task sequence that the robot system can execute, and modifies the planning results in real time according to the task execution situation.
[0028] The robot manager 2 includes a component management module 20 , an interface management module 21 , a state analysis module 22 , a task analysis module 23 , an error handling module 24 and an execution control module 25 . It is mainly responsible for sending the tasks generated by the task planner 1 to the corresponding robots for execution, and then feeding back t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More