

Angular velocity estimation based self-adaptive fuzzy sliding mode control method for micro gyroscope
An adaptive fuzzy, micro-gyroscope technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of inconvenient control parameter learning and adjustment, difficult to ensure the stability of the control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
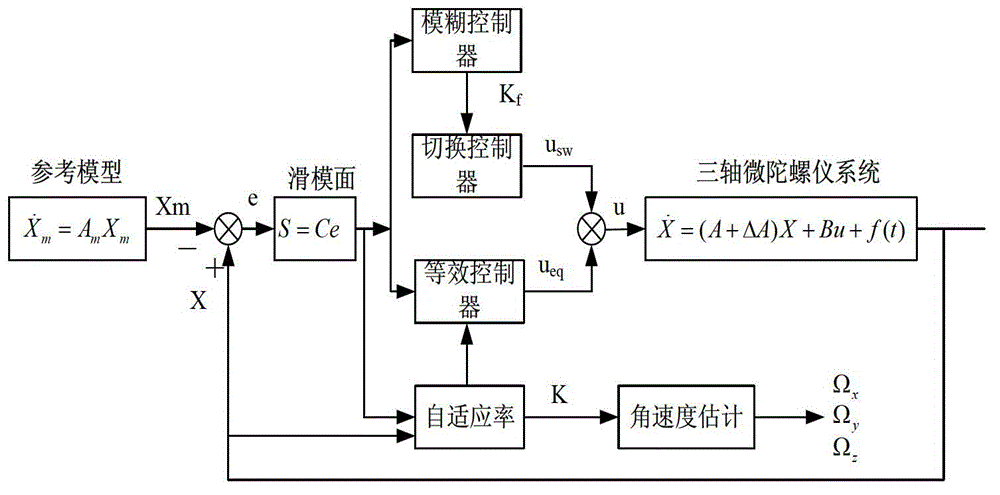
[0065] Adaptive fuzzy sliding mode control method based on angular velocity estimation for micro gyroscope, including the following parts
[0066] 1. Establish the dimensionless dynamic equation of the three-axis micro-gyroscope
[0067] For a three-axis micro-gyroscope, it can be considered that the mass block can move in space. Assuming that the three-axis micro-gyroscope can rotate at a uniform angular velocity in the three directions of x-axis, y-axis and z-axis respectively, and the centrifugal force is negligible, the dynamic equation of the three-axis micro-gyroscope is as follows:
[0068] m x . . + d xx x . + d xy y ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More