

Calibration method for 3D (three-dimensional) acquisition system
A technology for acquiring systems and calibration methods, applied in the field of system calibration, which can solve problems such as low efficiency, slow speed, and unguaranteed calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0061] In Embodiment 1, the depth sensor is a two-dimensional laser radar; the image sensor is a color CMOS image sensor or a color CCD image sensor; the position and attitude sensor is an integrated navigation system composed of GPS and IMU.
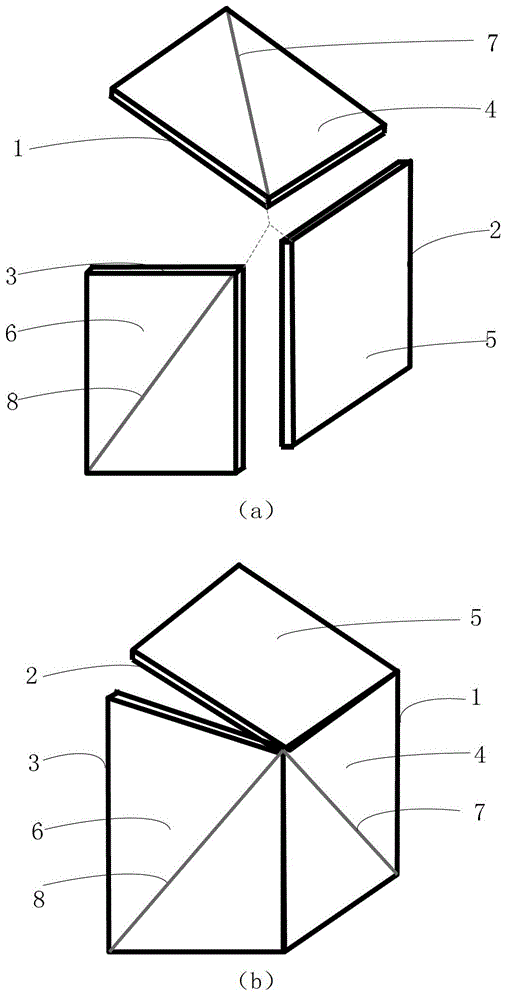
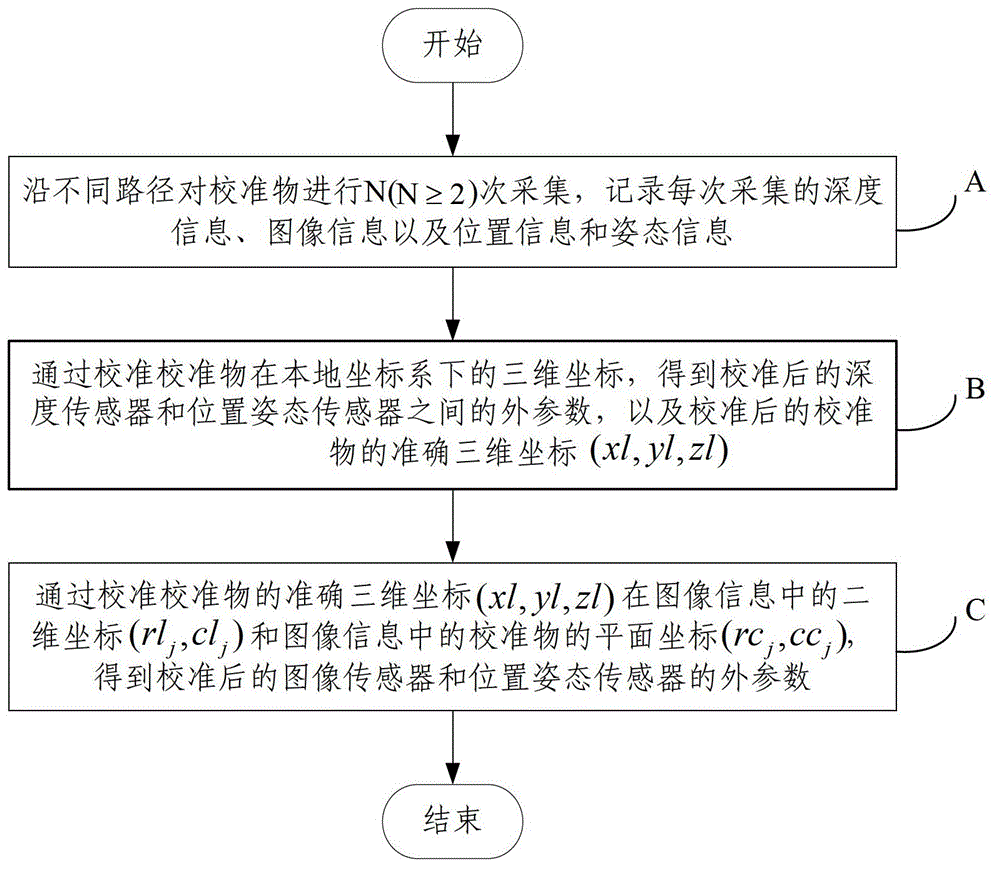
[0062] Step A: Use the 3D acquisition system to collect N (N ≥ 2) times of calibration objects along different paths, that is, use the depth sensor, image sensor and position and attitude sensor placed on the mobile platform to collect N (N ≥ 2) times of calibration objects along different paths. ≥2) acquisitions; each acquisition records a set of depth information of the calibration object obtained by the depth sensor, records one ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More