

Autopilot control system of underwater vehicle
A technology for autopilots and underwater vehicles, applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as control system collapse, complex interconnection of components, and reduced reliability. Improve work efficiency, improve system efficiency, and reduce connection cables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Describe the present invention below in conjunction with specific embodiment:
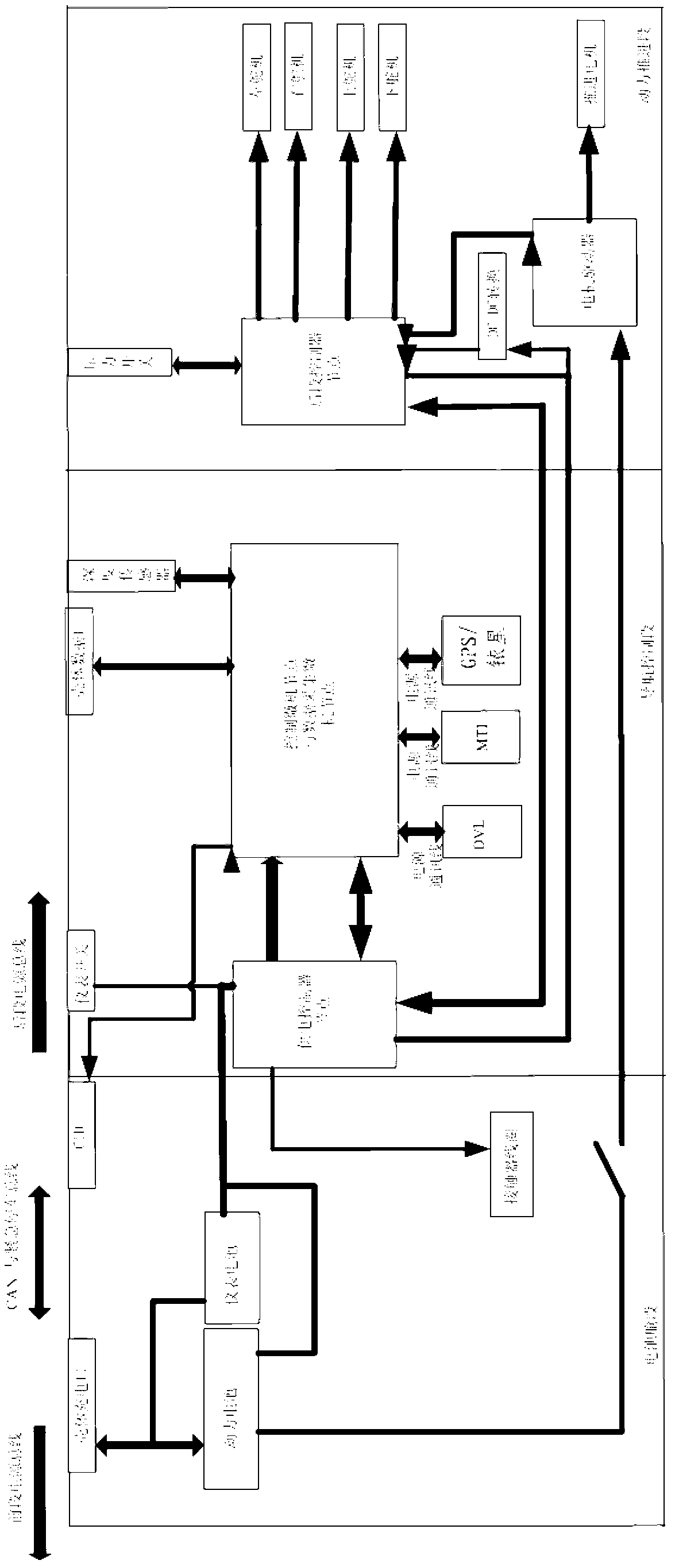
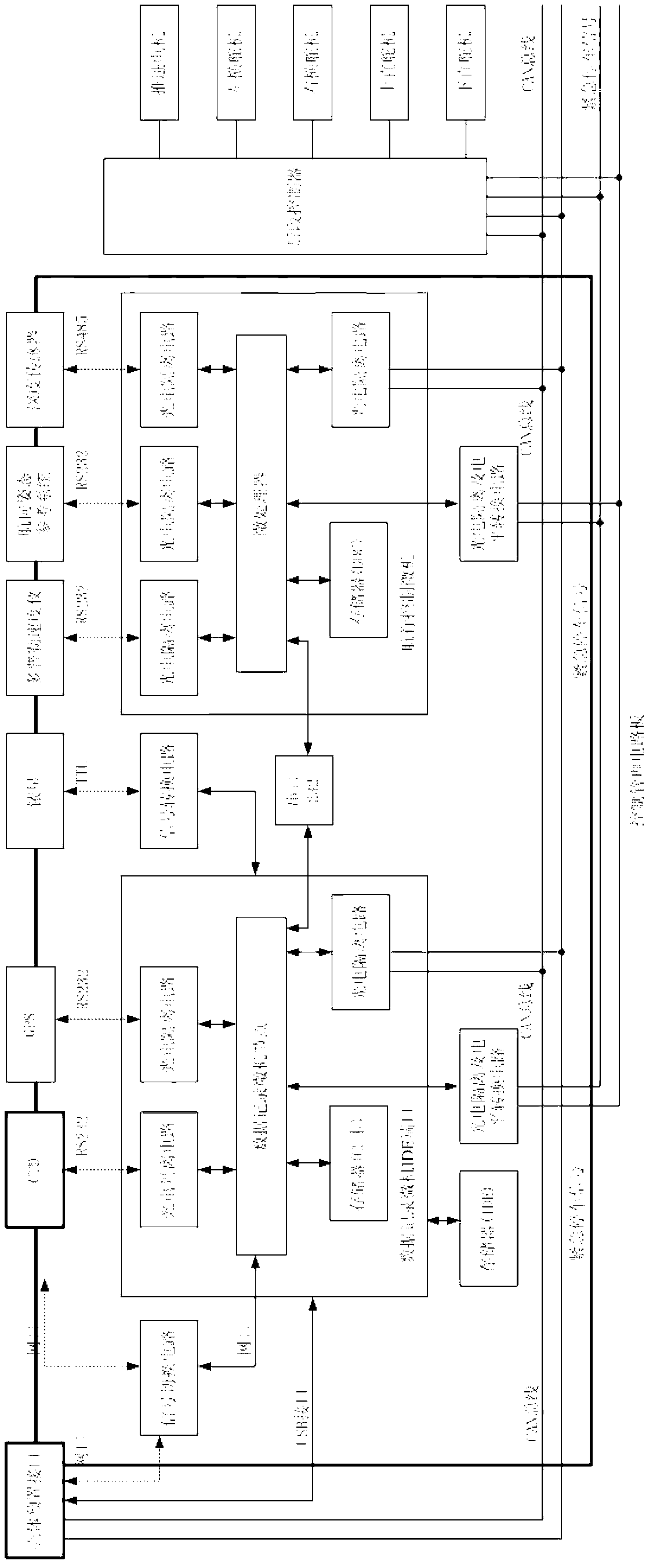
[0025] The autopilot control system based on the underwater vehicle (hereinafter referred to as AUV) provided by this embodiment separates the data recorder from the controller, and the data acquisition microcomputer node as the data recorder not only completes the data recording function, The relevant equipment of the communication system node is connected through the serial port to complete the extraction of data information; the CAN network is used as the communication core of the control system to realize the internal interconnection and information exchange with the nodes of other control systems during the navigation process of the underwater vehicle.
[0026] This embodiment includes control microcomputer node, data acquisition microcomputer node and detection communication system node; detection communication system node consists of iridium star wireless communication module, GPS posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More