

Four-foot bio-robot leg
A bionic robot, thigh technology, applied in the field of robot legs, can solve problems such as single movement structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
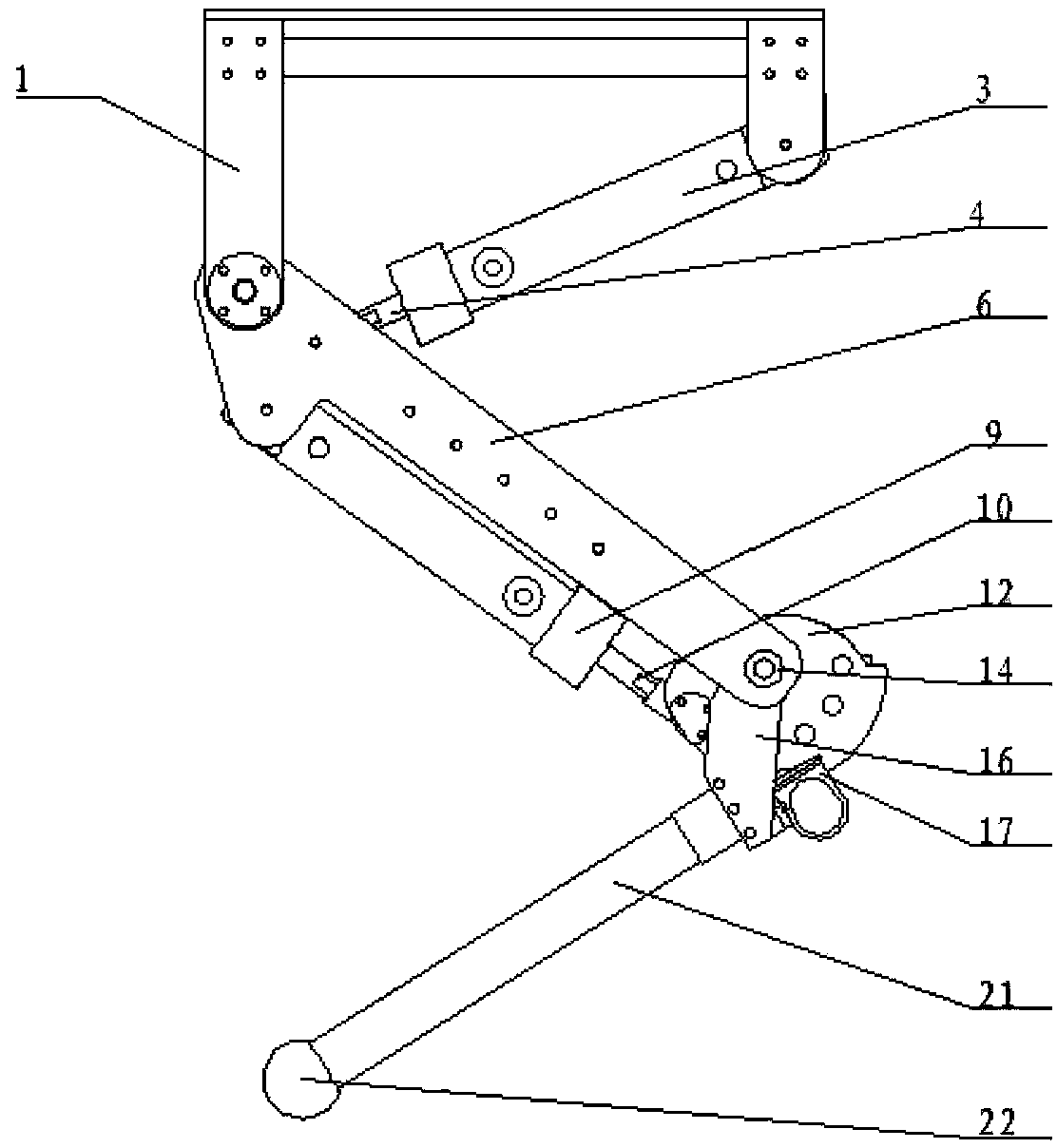
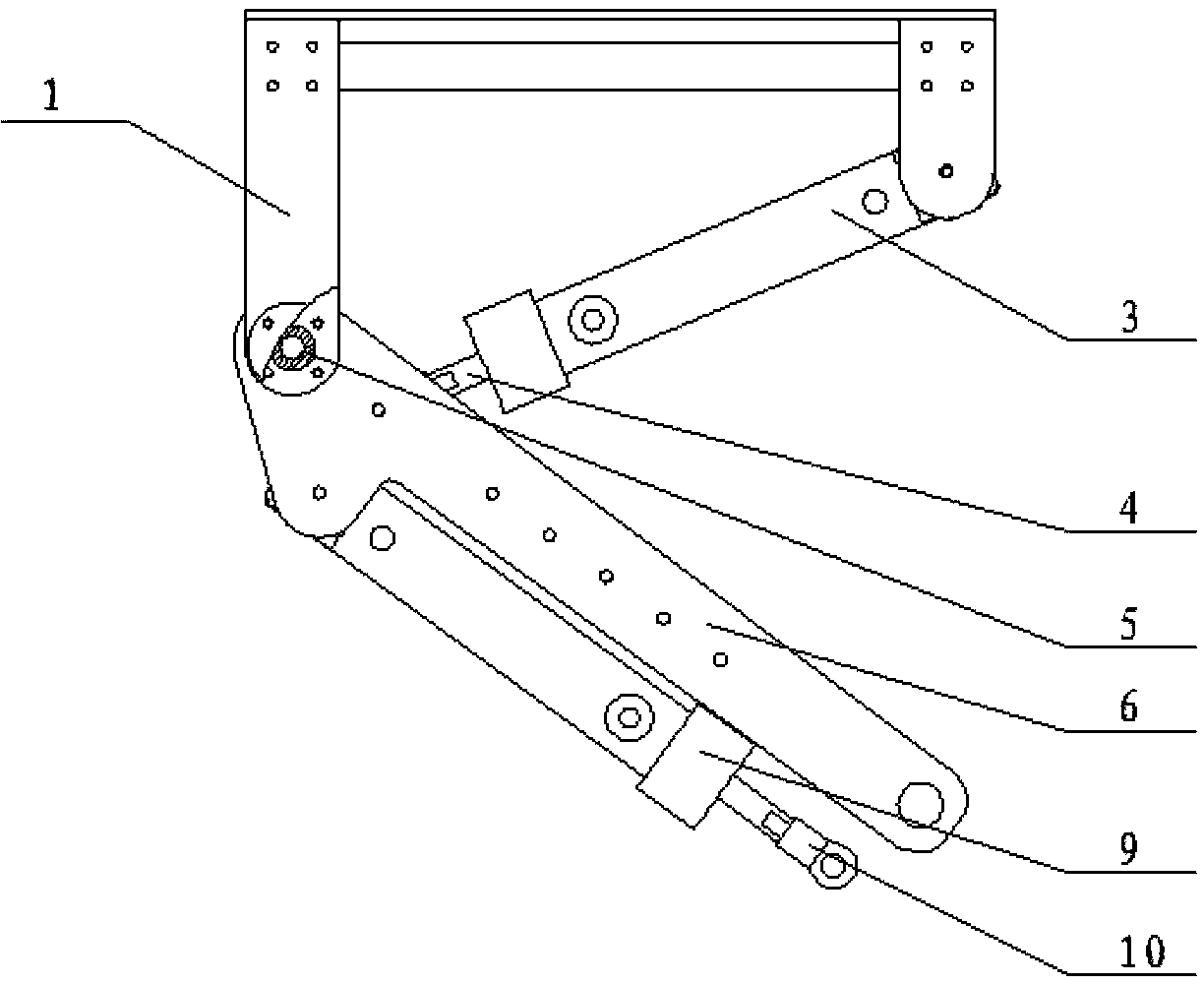
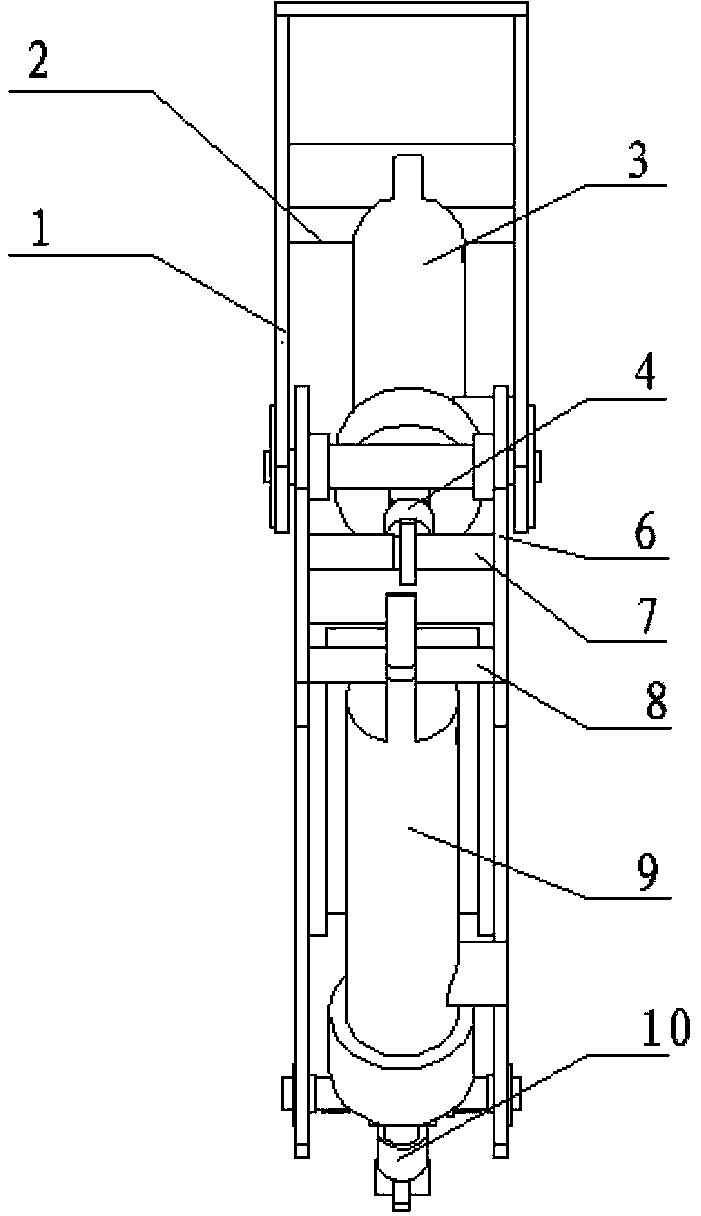
[0020] The following examples refer to Figure 1-8 .
[0021] This embodiment is a single leg of a hydraulically driven rigid-flexible compound quadruped robot. The robot leg is composed of a body, a thigh, a joint rigid-flexible modulation mechanism, and a lower leg. The power drive device adopts hydraulic drive. On the basis of the rigid structure, a flexible link spring is set to buffer and absorb shock. The body part is composed of a body support 1, a body hydraulic cylinder shaft 2, a first hydraulic cylinder body 3 and a first hydraulic cylinder piston rod 4. Body is connected with thigh connecting bearing 5 with thigh. The thigh part is made up of the thigh support 6, the first hydraulic cylinder shaft 7 of the thigh, the second hydraulic cylinder shaft 8 of the thigh, the cylinder block 9 of the second hydraulic cylinder and the piston rod 10 of the second hydraulic cylinder. The joint stiffness-flexibility modulation mechanism is composed of the joint disc 12 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More