

System and method for verifying visual autonomous landing simulation of unmanned aerial vehicle
A technology for simulation verification and autonomous landing, applied to measuring devices, instruments, etc., can solve problems such as landing failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
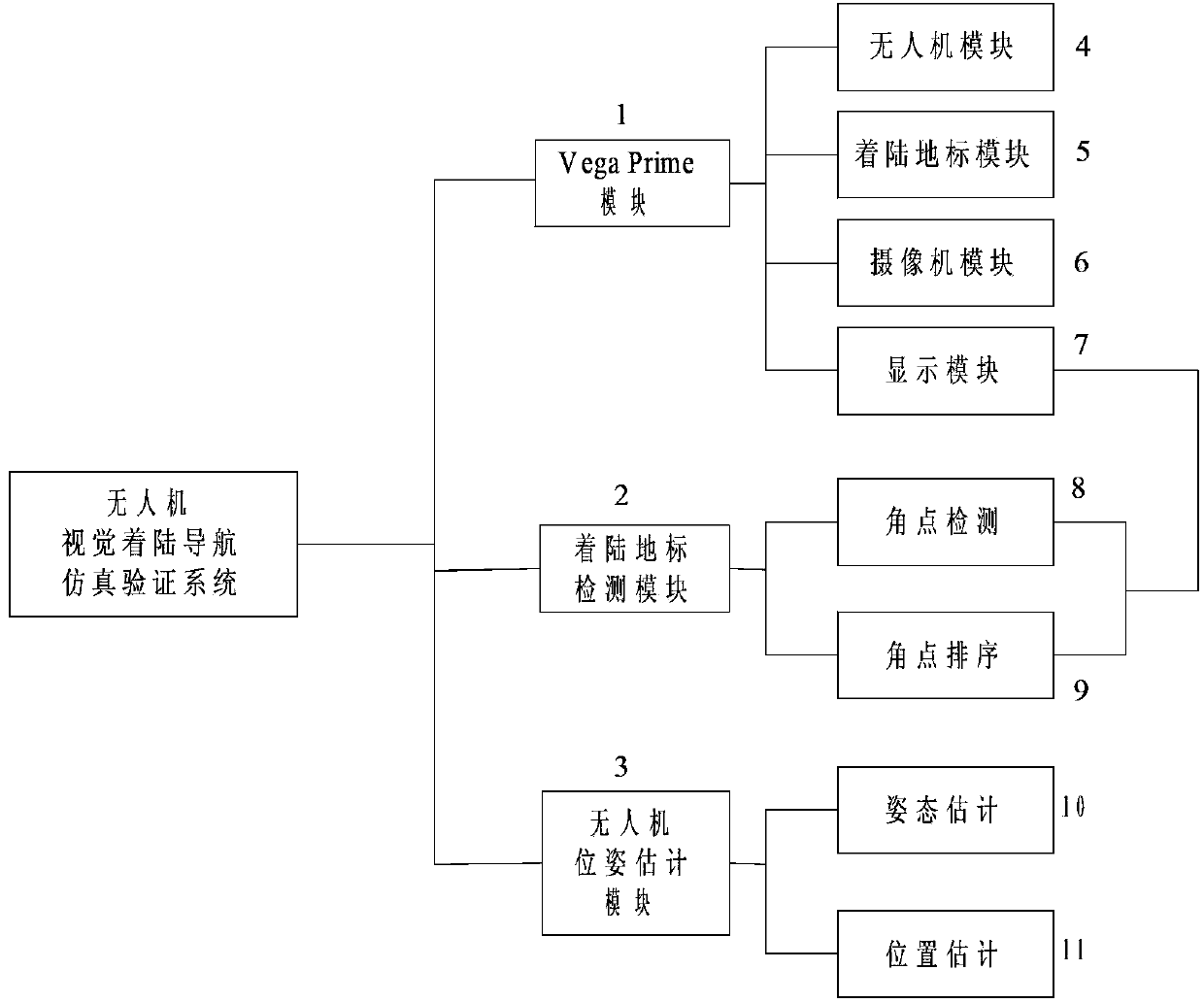
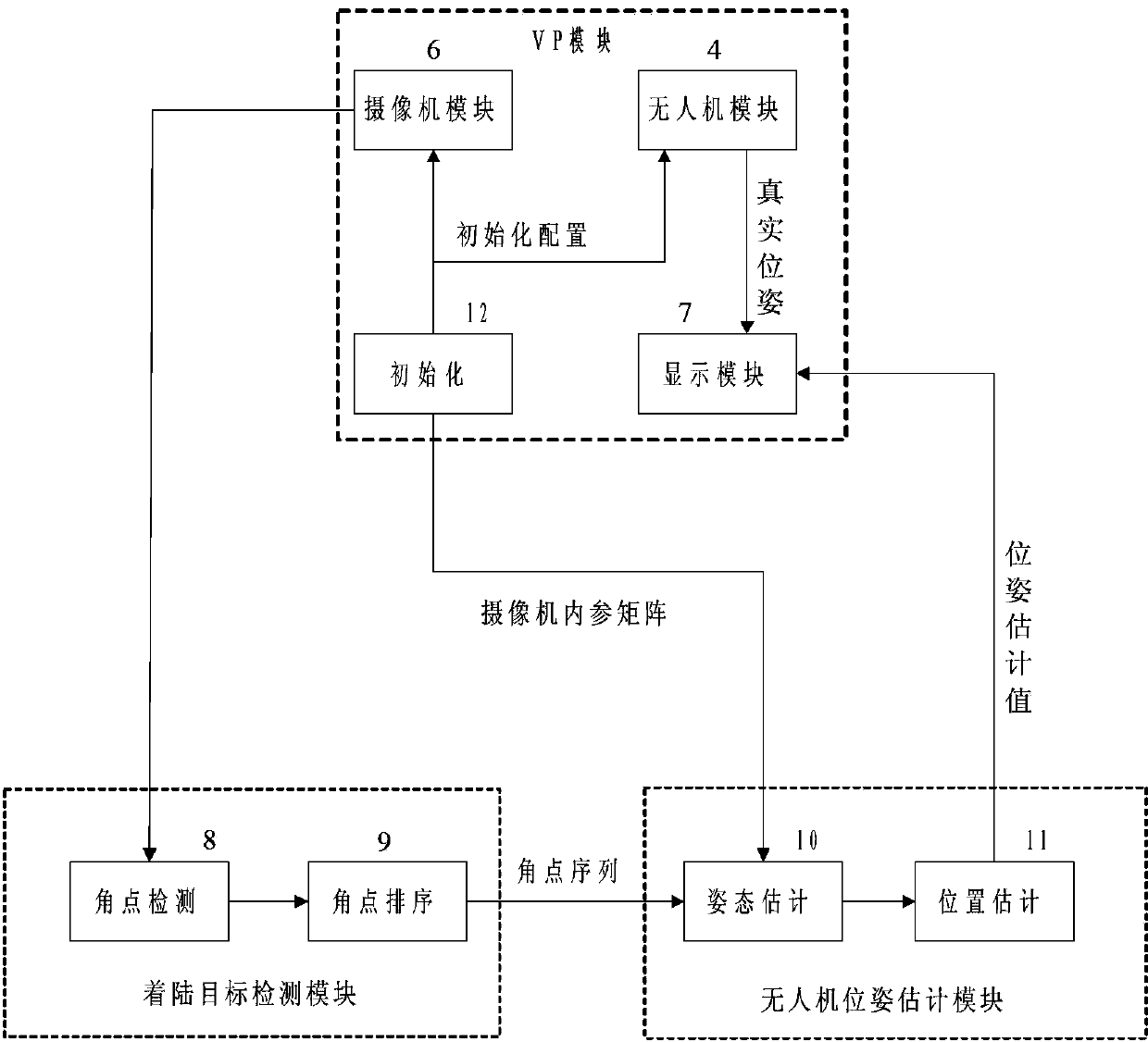
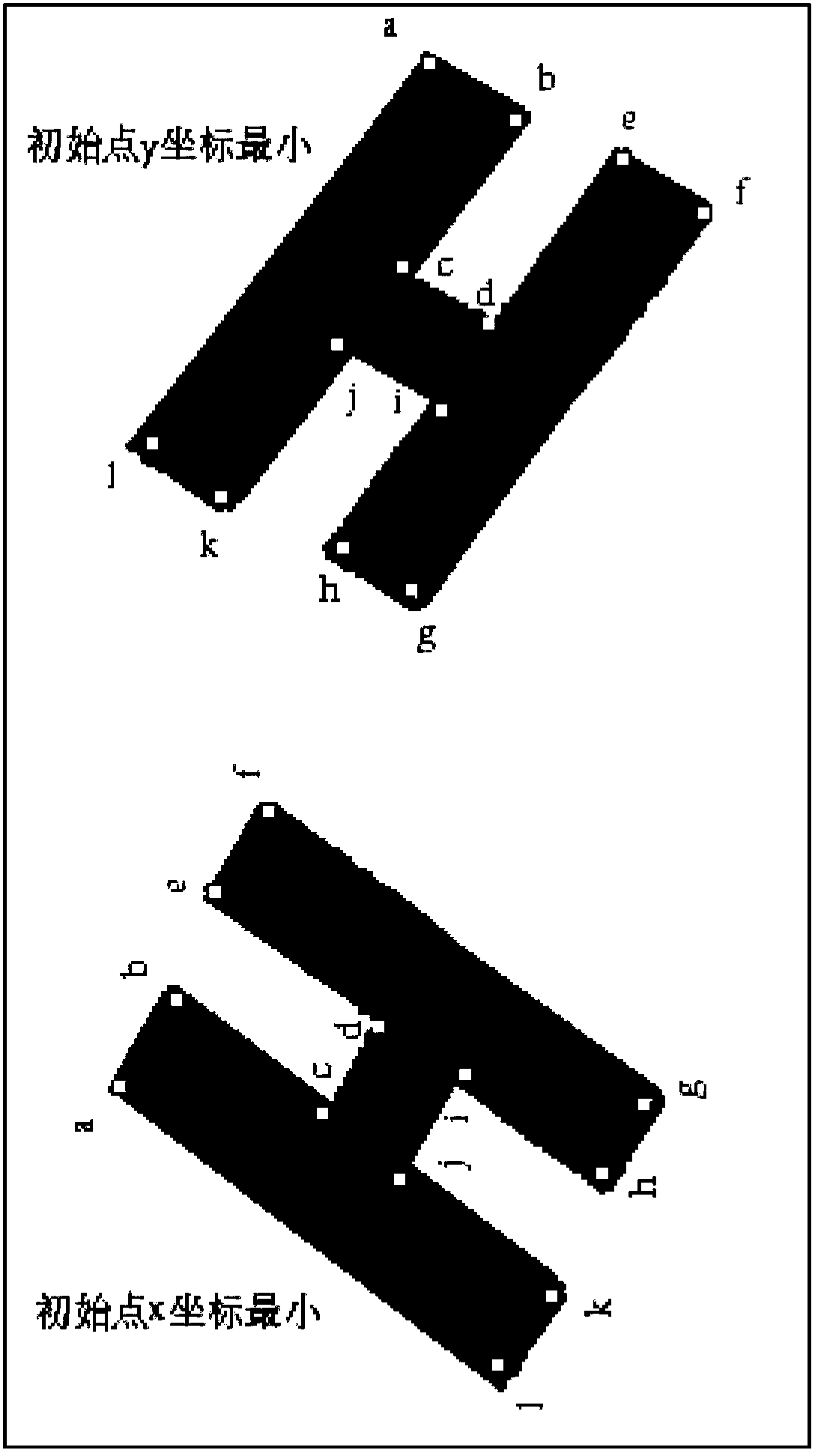
[0044] The entire landing process of the UAV is divided into several stages. The present invention assumes that the UAV relies on GPS or other navigation equipment to guide it to fly over the landing mark, and the landing mark is always within the range of the camera image. The function of the airborne camera is simulated by the VegaPrime observer, and the characteristics of the UAV pose can be set by VegaPrime, and the internal parameter matrix of the simulated camera is successfully obtained through the inverse solution of the UAV pose estimation algorithm. An H-shaped landing landmark with known dimensions was designed using the Creator 3D modeling tool. On this basis, using the combination of VegaPrime and vision algorithm, a UAV visual autonomous landing simulation verification system application is designed and implemented.
[0045] Such as figure 1 As shown, a UAV visual autonomous landing simulation verification system is characterized in that it includes at least a V...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More