

Elastic assembly capable of providing non-linear variable rigidity
An elastic component and non-linear technology, applied in the field of elastic components, can solve the problems of high energy consumption environment adaptability and small size of robots, and achieve the effects of compact structure, small size, high impact resistance and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings. It should be understood that the specific embodiments described herein are only used to illustrate and explain the present invention, and not to limit the present invention.
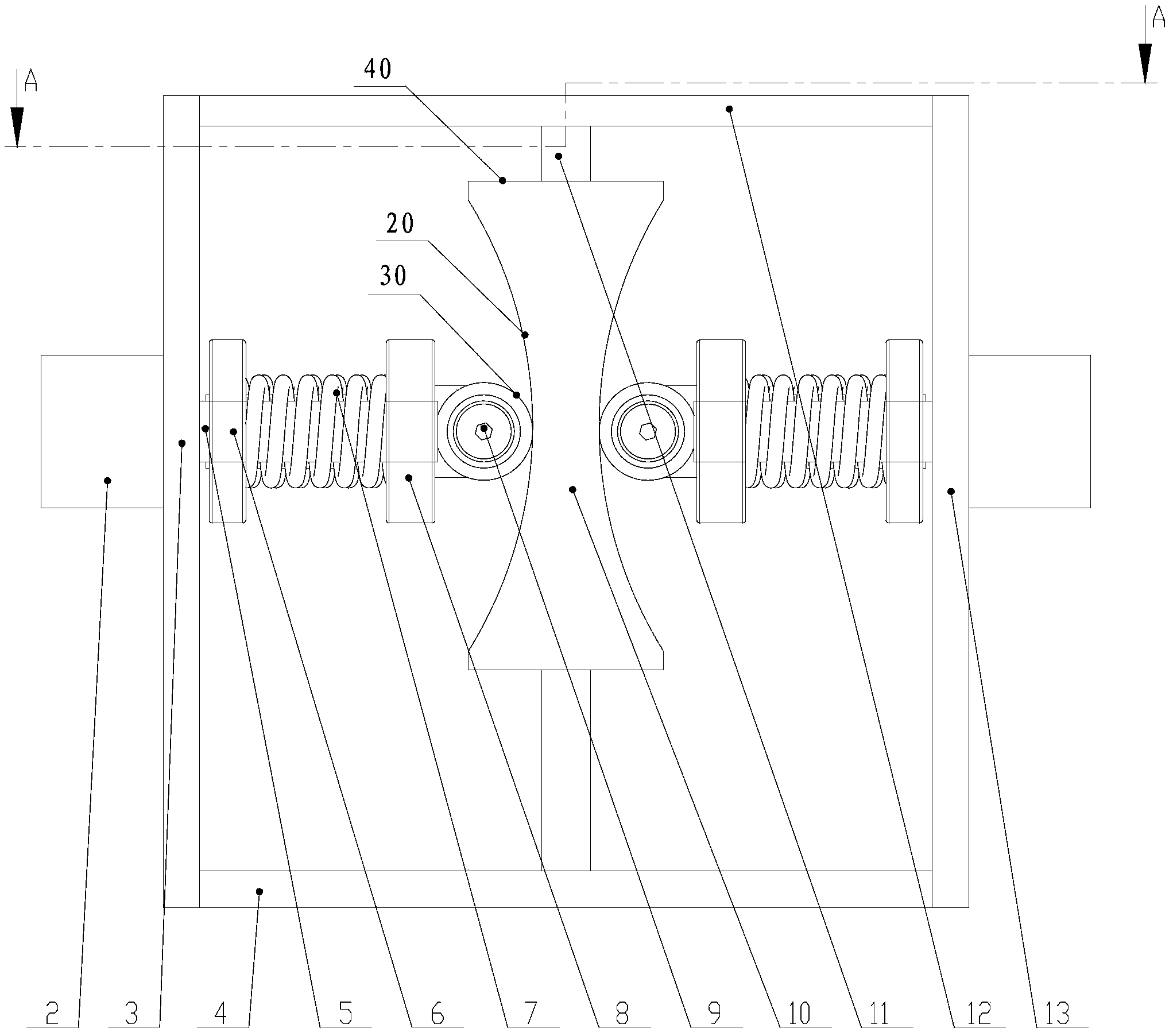
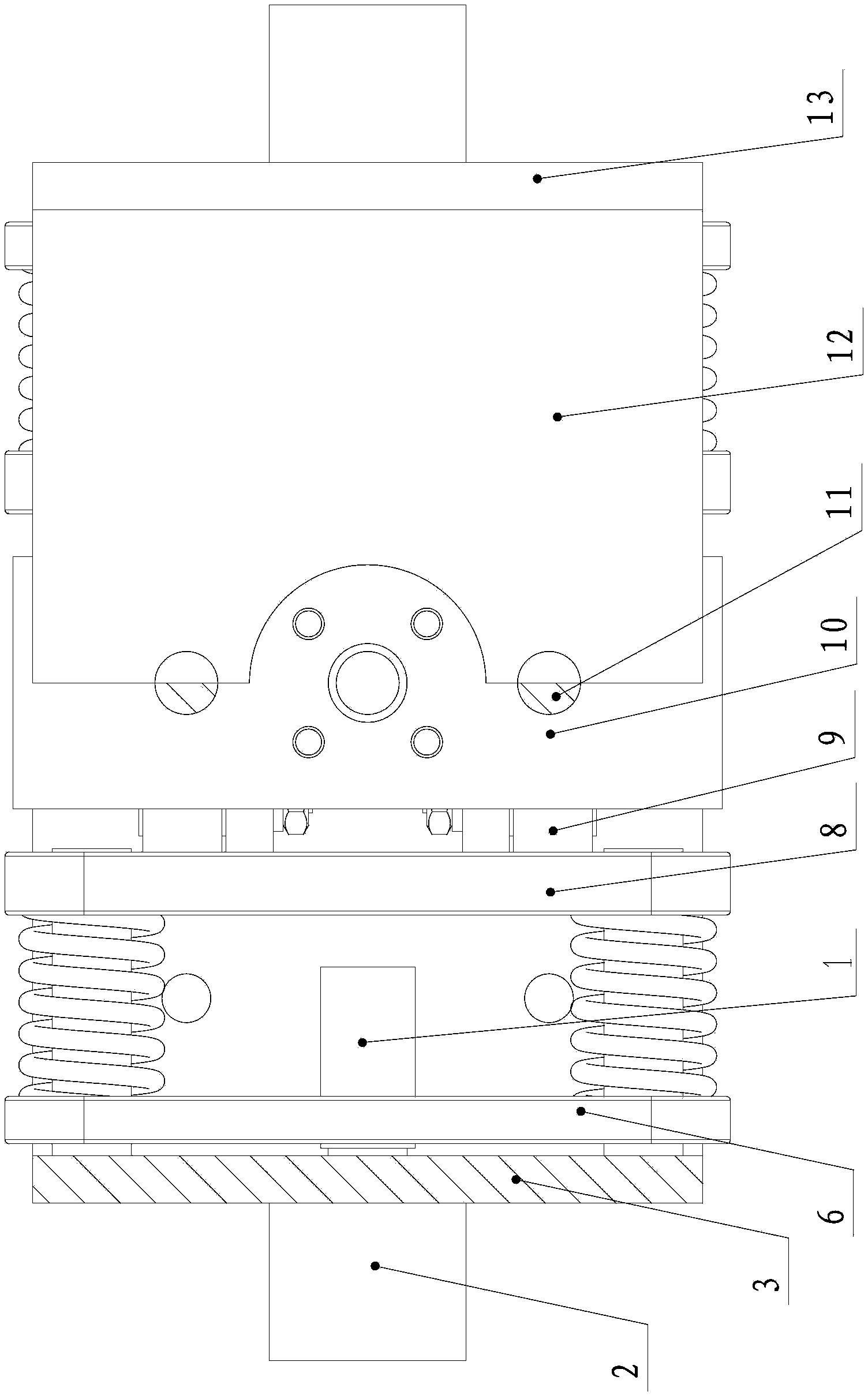
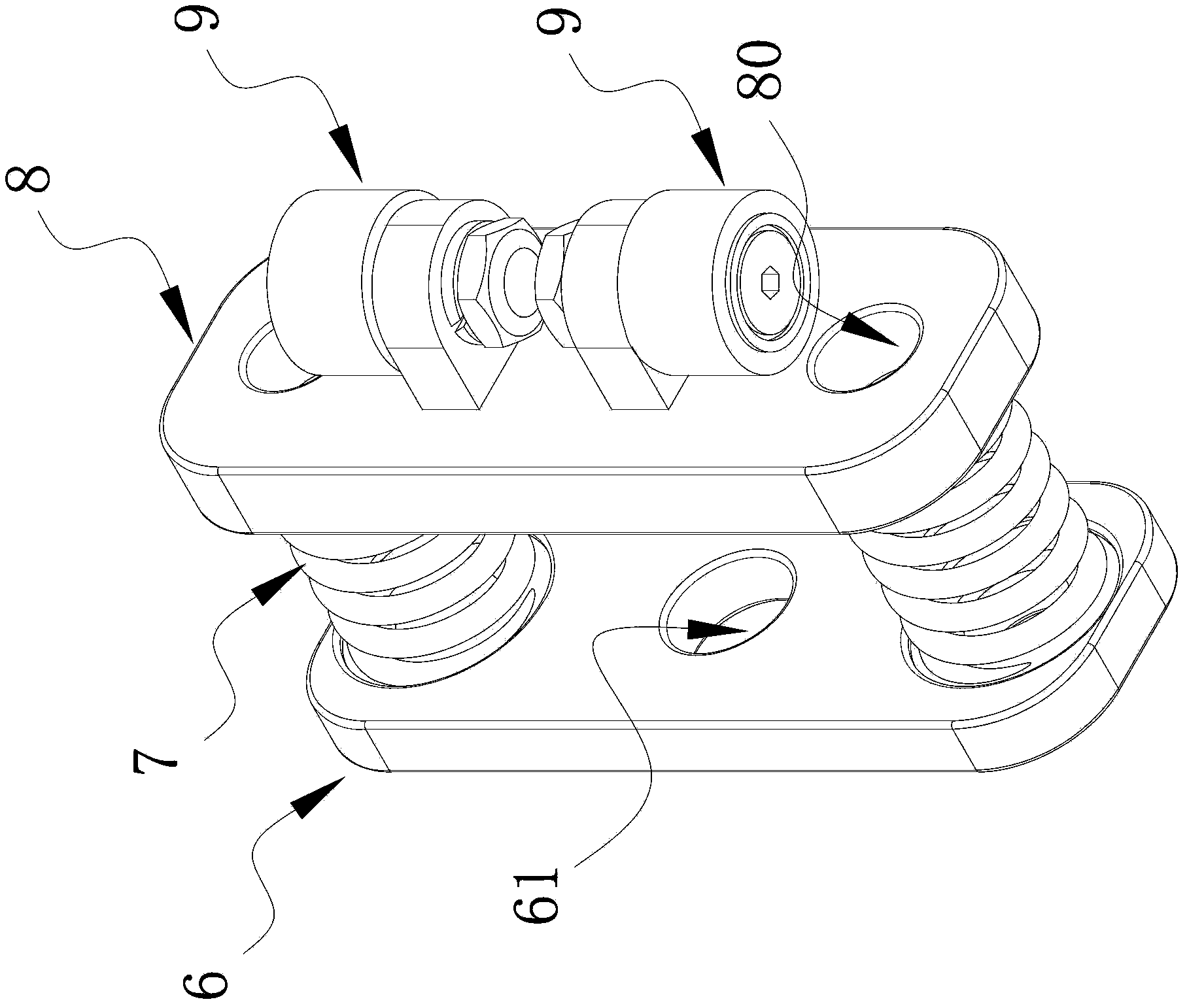
[0043] See Figure 1 to Figure 15 The present invention provides an elastic component capable of providing non-linear variable stiffness, which mainly includes a clamping component and a clamped part.
[0044] Wherein, the clamping assembly includes a clamping arm group composed of a plurality of clamping arms, at least one of the clamping arm groups has a variable clamping force, wherein the clamping force is variable. The arm set includes at least one elastic clamping arm 17;
[0045] The clamped part is clamped by at least one set of the clamping arm group, and can move linearly relative to the clamping arm group in a state of being clamped by the clamping arm group, and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More