

A biped wall-climbing robot
A wall-climbing robot and legged technology, applied in the field of wall-climbing robots, can solve problems such as poor ability to cross obstacles, and achieve the effects of strong ability to overcome obstacles, smooth movement, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
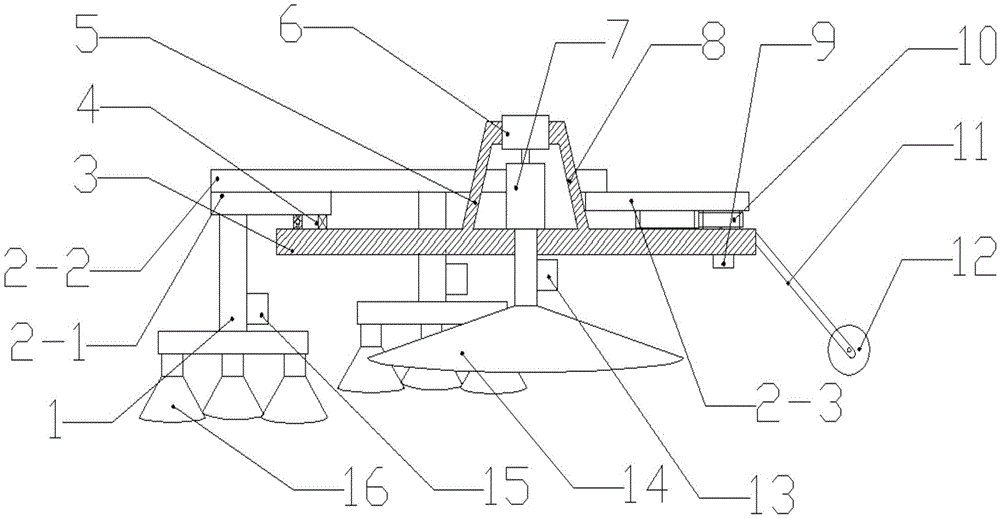
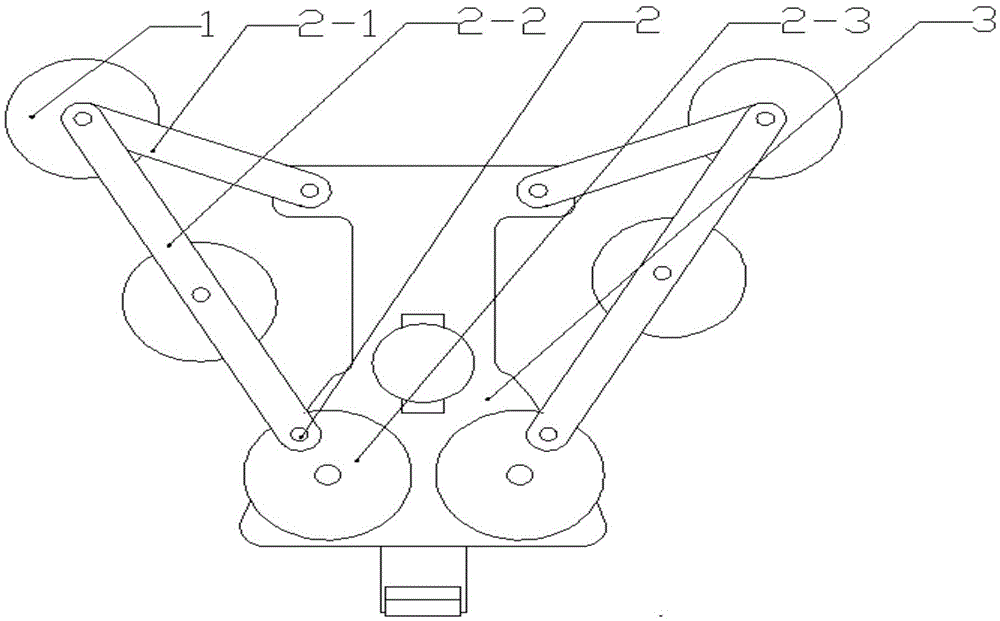
[0013] Such as figure 1 and figure 2 As shown, a biped wall-climbing robot has a frame 3, an adsorption crawling device and a steering device installed on the frame 3, and a control unit for controlling the movement and stop of the adsorption crawling device and the steering device.
[0014] The adsorption crawling device includes two crank-rocker mechanisms mounted symmetrically on the frame consisting of crank 2-3, connecting rod 2-2, and rocker 2-1, and a driving device for driving the crank-rocker mechanism to move. , one end of rocker 2-1 is connected with frame 3, the other end is connected with crank 2-3 through connecting rod 2-2, crank 2-3 is connected with frame 3, rocker 2-1 is equipped with feet Disc 1, a sucker group 16 is installed on the leg disc 1, and a miniature vacuum pump II 15 for vacuuming the sucker group 16.
[0015] The steering device includes a steering suction cup 14 installed on the frame 3, a telescopic cylinder providing power to the steering ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More