

Finite-thrust driven spacecraft automatic-rendezvous trajectory planning method on basis of convex optimization technology
A trajectory planning and spacecraft technology, applied to instruments, integrated navigators, three-dimensional position/course control, etc., can solve problems such as difficult real-time calculation, large amount of calculation, and long calculation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the drawings and embodiments. The present invention includes but is not limited to the following embodiments.
[0060] A method for trajectory planning of limited thrust based on convex optimization technology, the specific steps include:
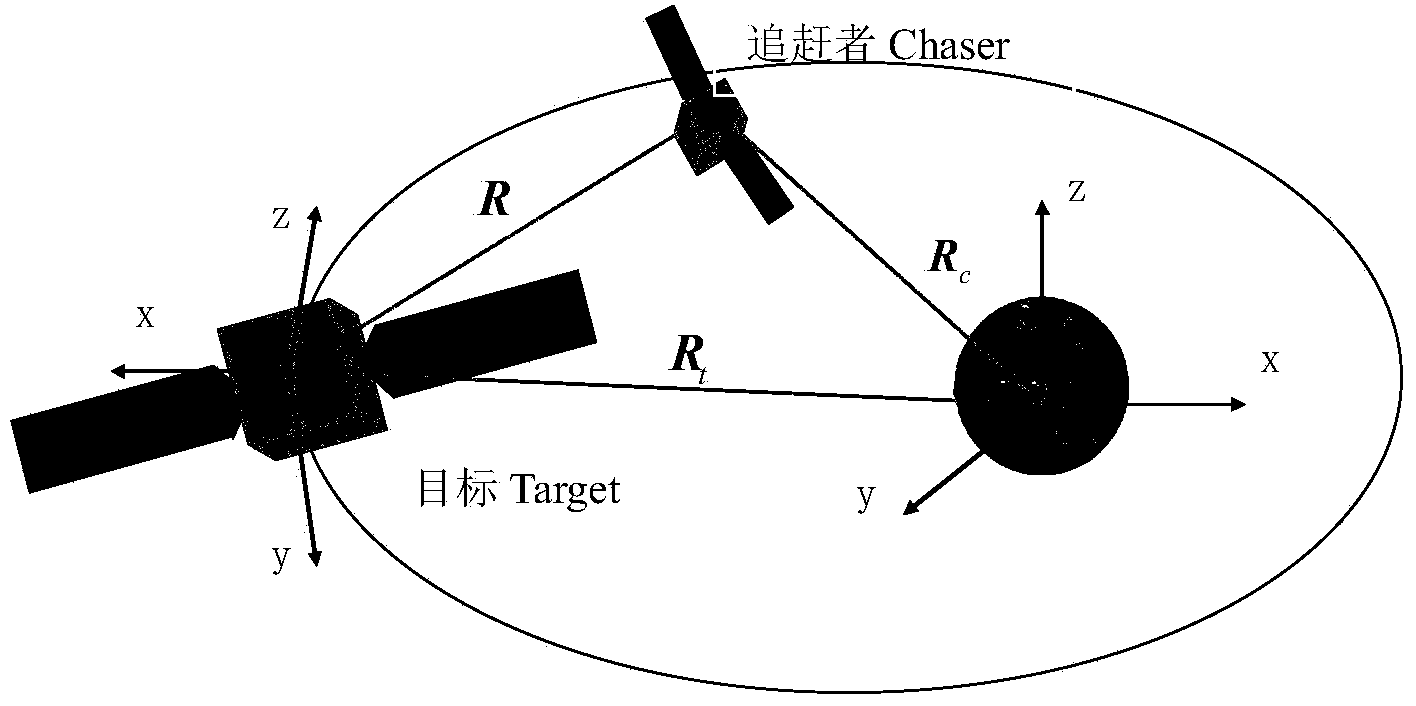
[0061] Step 1: Establish a mathematical model describing the relative motion of the two spacecraft
[0062] Here, the HCW equation is used to describe the close relative motion of two spacecraft:
[0063] x . . - 2 n y . - 3 n 2 x = F x m y . . + 2 n x . = F y m z . . + n 2 z = F z m - - - ( 1 )
[0064] Among them, m and n represent the mass and orbital angular velocity of the target spacecraft, (F x ,F y ,F z ) T For track control, Represents the relative position and relative speed in the orbital coordinate system. Just li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More