

Mobile robot path planning method based on improvement of ant colony algorithm and particle swarm optimization
A mobile robot and particle swarm algorithm technology, applied in the field of mobile robots, can solve problems such as large number of iterations, too large search space, and complex algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The content of the present invention will be described in detail below with reference to the drawings and embodiments, but the present invention is not limited thereto.
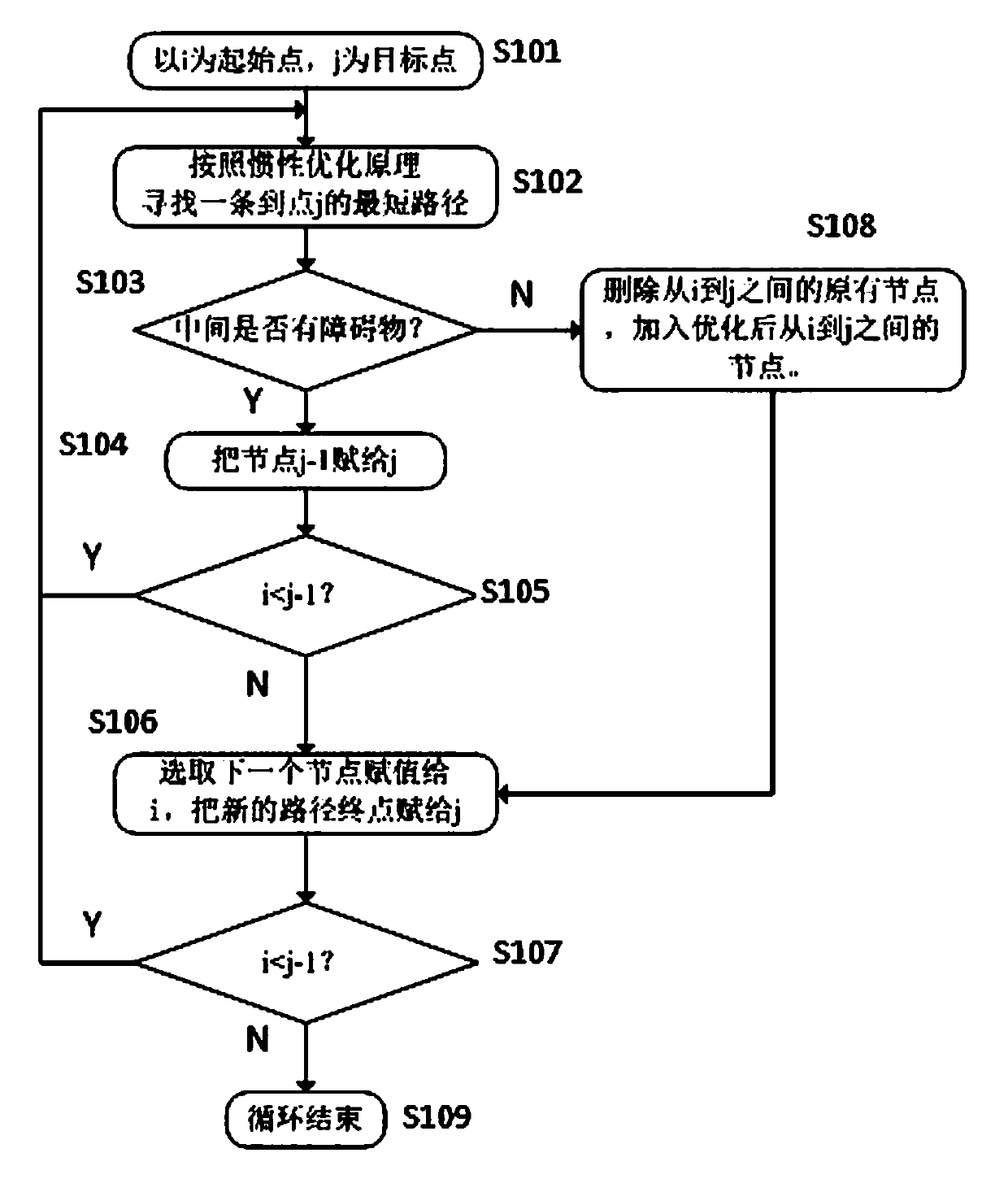
[0059] A kind of mobile robot path planning method based on improved ant colony particle swarm algorithm of the present invention, specifically comprises the following steps:
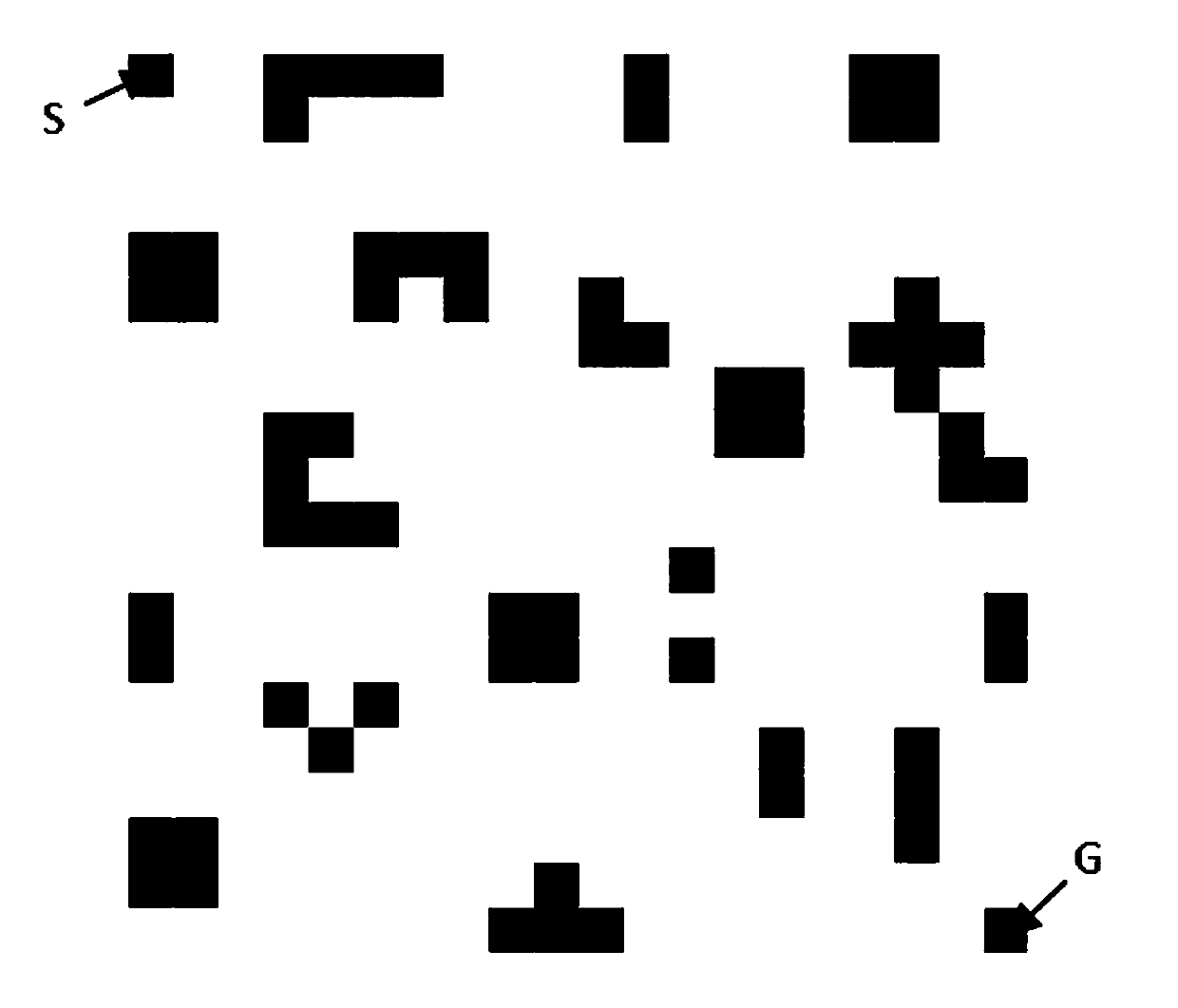
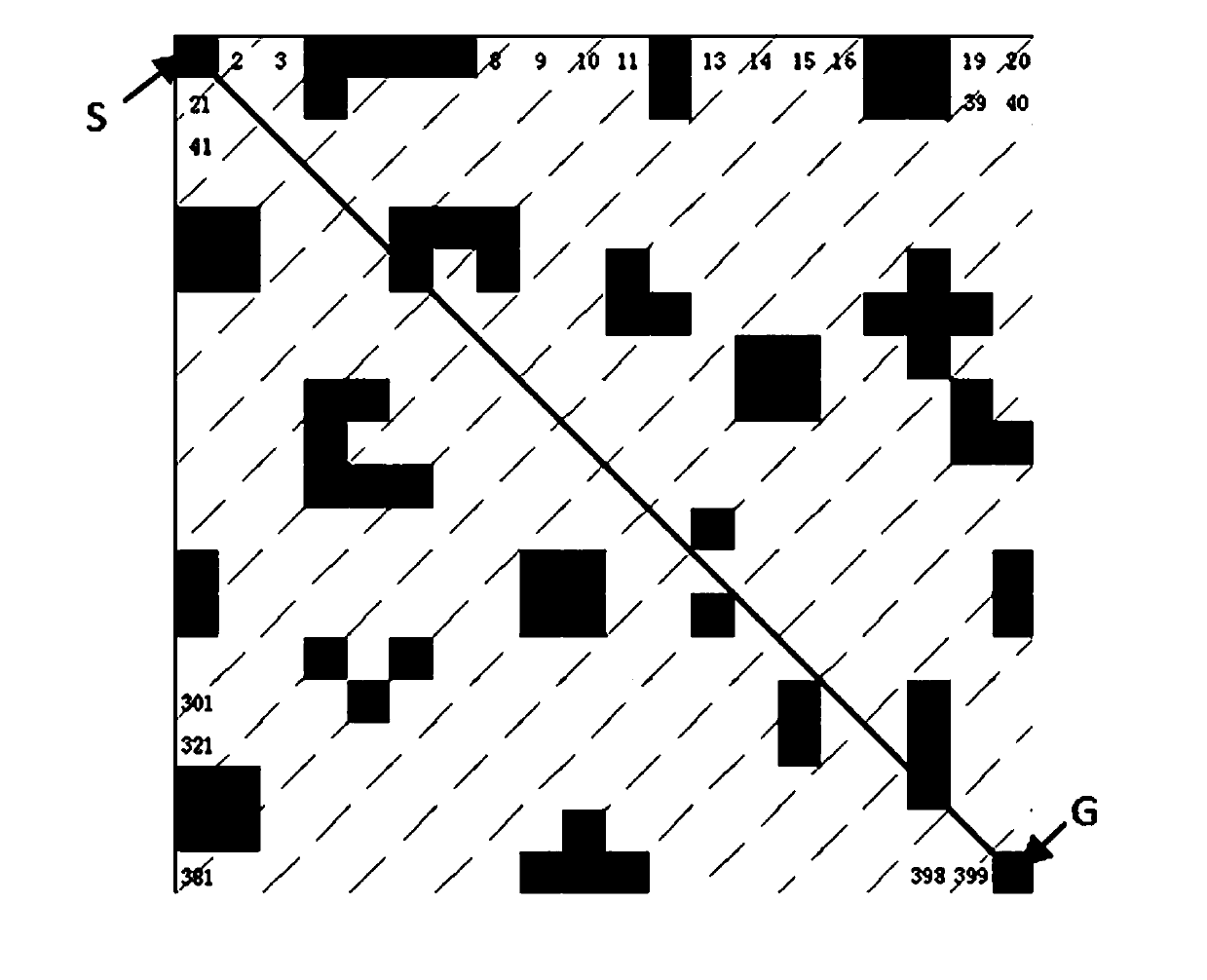
[0060] Step 1: Environment Modeling:
[0061] Path planning for a mobile robot is to find a sequence of points in the working environment from a starting point to a goal point. Without loss of generality, the following regulations are made on the working space of the mobile robot: (1) The range of activities of the mobile robot is in a limited two-dimensional space; (2) Based on the size of the mobile robot, the size of the obstacle is Expand outward, regard the robot as a mass point; (3) Obstacles are composed of arbitrary grid squares, the number is limited, and these obstacles will not change and move during the movement of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More