

Full-digital servo system controller of two-wheel micro-mouse based on dual processors
A microcomputer mouse and servo system technology, applied in the field of robots, can solve the problems of burning out the motor, poor anti-interference ability, serious body heating, etc., and achieve the effects of simple system debugging, broad market prospects, and strong anti-interference ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0032] see Figure 1 to Figure 3 , the embodiment of the present invention includes:
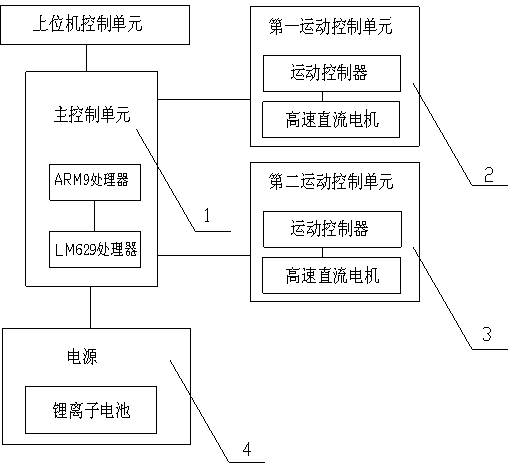
[0033] A full-digital servo system controller based on a dual-core two-wheel microcomputer mouse includes: a main control unit 1 , a first motion control unit 2 , a second motion control unit 3 and a power supply 4 .
[0034] The power supply 4 is electrically connected to the main control unit 1, and the main control unit 1 includes an ARM9 processor and an LM629 processor, and the ARM9 processor is electrically connected to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More