AGV hoisting correction system based on non-guided path and method thereof
A technology for correcting systems and paths, applied in the direction of control using feedback, can solve the problems of long operation time and heavy workload, and achieve the effect of solving the heavy workload, improving the degree of automation, and reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
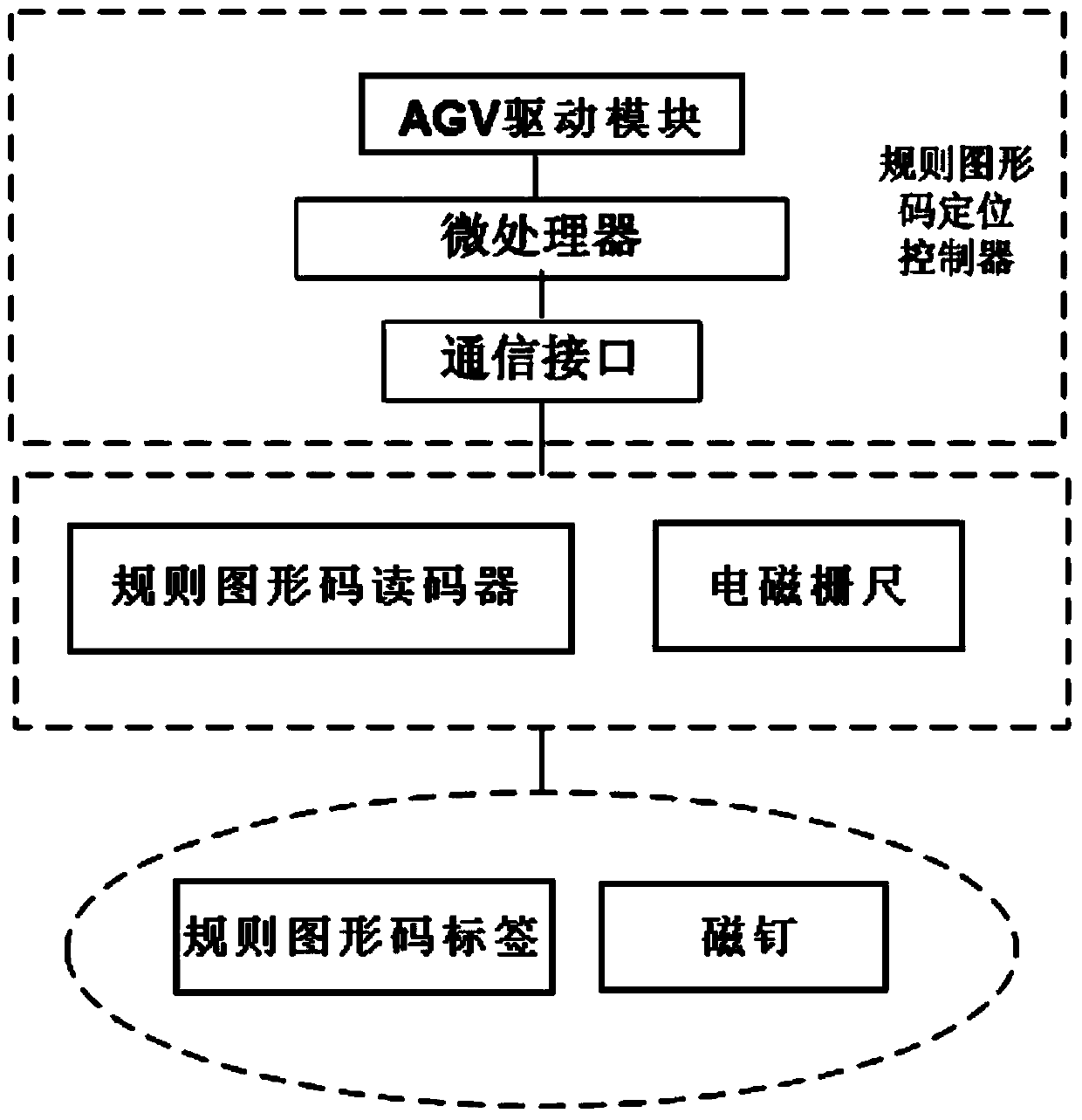
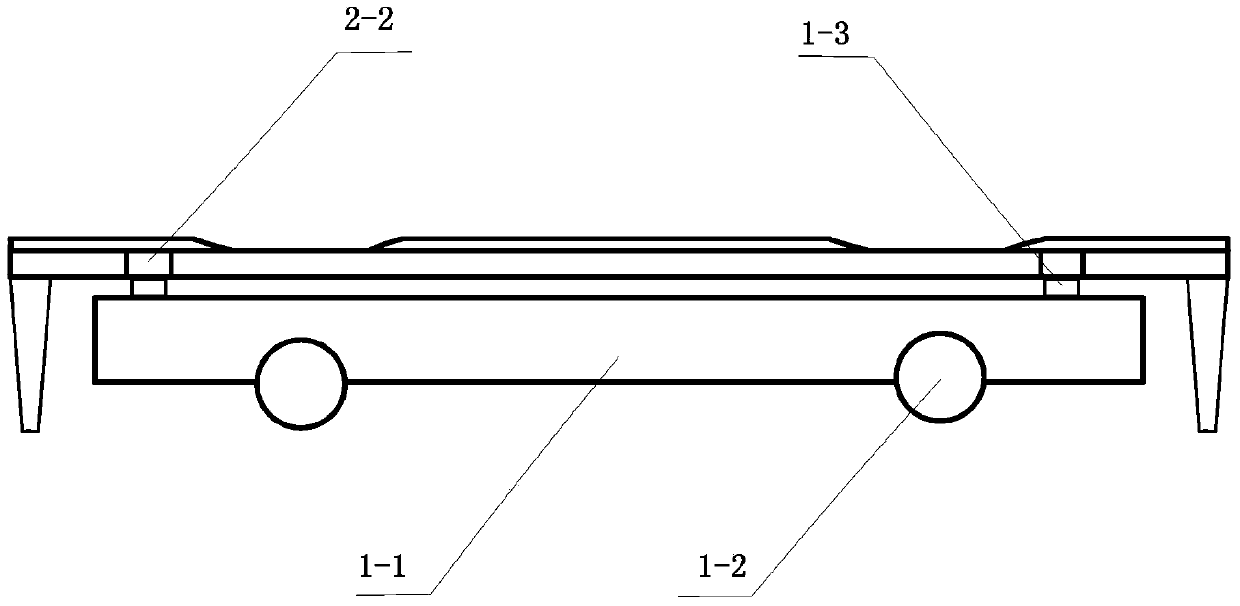
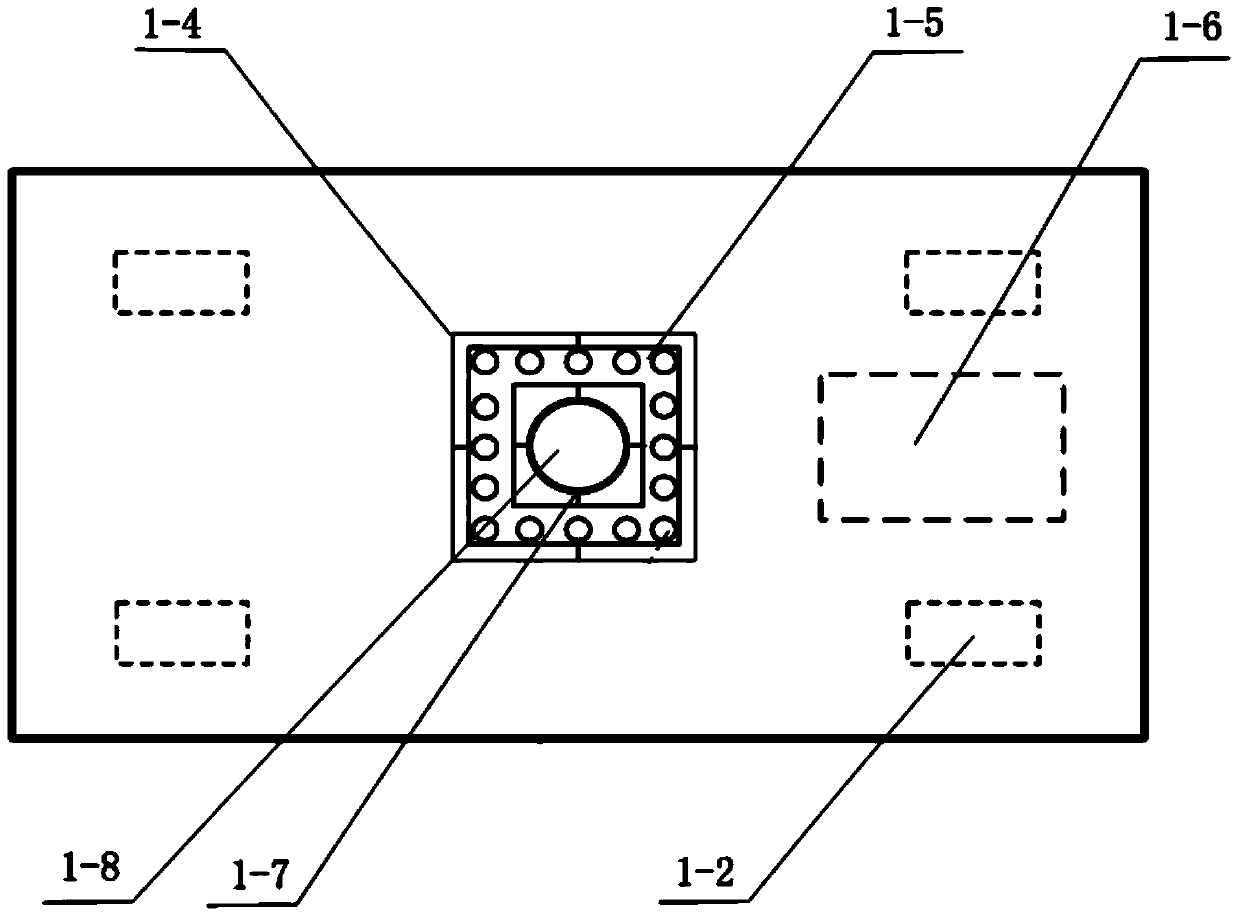
[0035] An AGV lift correction system based on a non-guided path, such as figure 1 As shown, it includes the cargo pallet, the regular graphic code positioning controller installed on the AGV trolley, the regular graphic code reader and electromagnetic scale installed in the center of the AGV body, the regular graphic code label installed on the lower surface of the cargo pallet and magnetic nail. In this embodiment, the regular graphic code label is a two-dimensional code label, and the regular graphic code reader is a two-dimensional code reader. The described regular graphic code positioning controller is composed of a microprocessor, a communication interface and an AGV drive module, and the microprocessor is connected with a regular graphic code code reader and an electromagnetic grating ruler through the communication interface to realize...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap