

Ankle joint rehabilitation device
A rehabilitation device and ankle joint technology, applied in passive exercise equipment, physiotherapy and other directions, can solve the problems of singular working space of parallel mechanism, non-overlapping rotation centers, and non-overlapping rotation centers, so as to avoid additional interference and avoid Energy loss, the effect of eliminating singular poses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
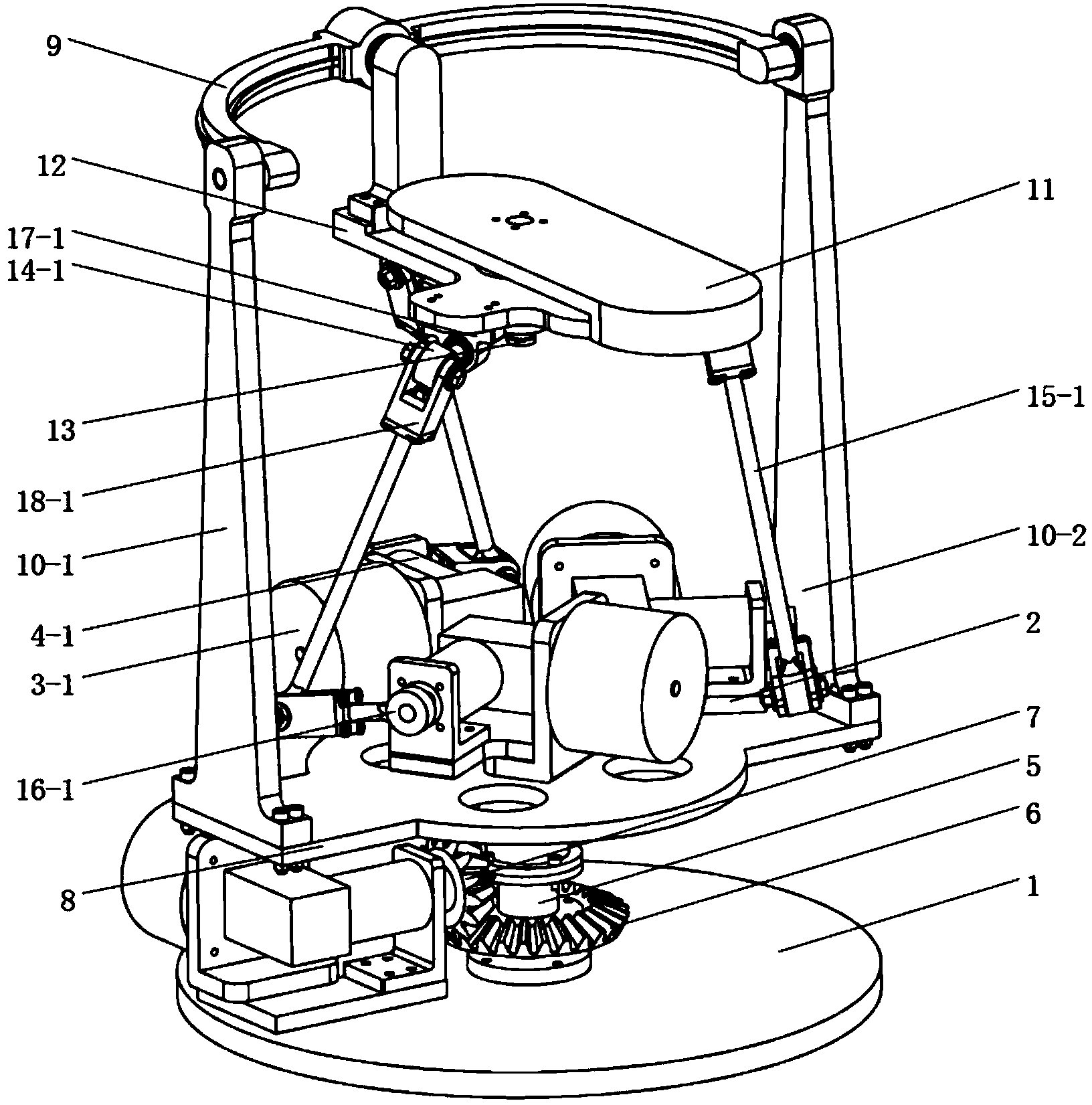
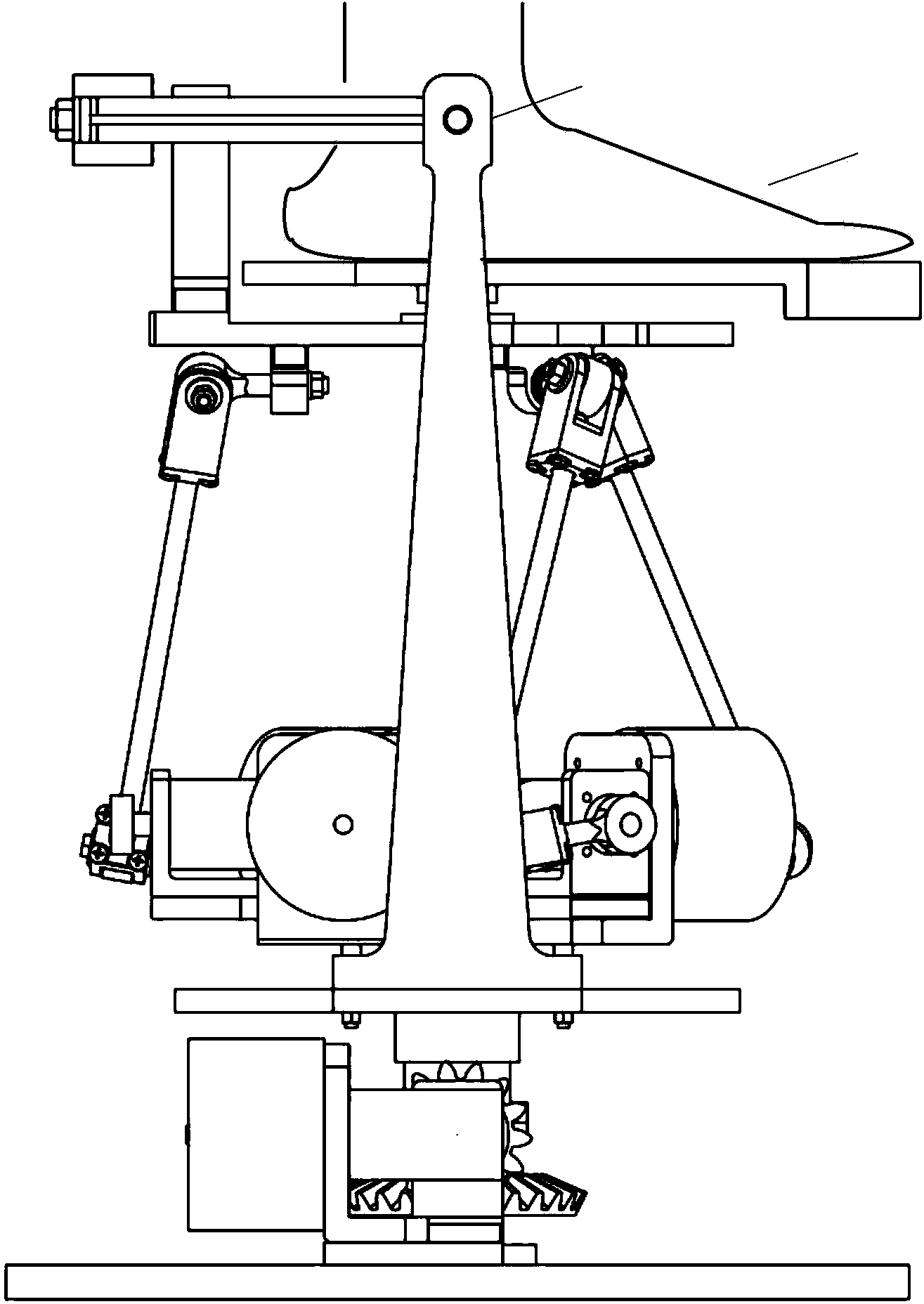
[0029] Such as Figure 1-Figure 9 As shown, an ankle joint rehabilitation device includes a base, a moving platform 19 , an active branch chain 20 and a constraint branch chain 21 . The base includes a base 1 and a support platform 2, the support platform 2 is fixed on the base 1 by a support rod 1-1; the base 1 is fixed with a fourth motor 3-4, and the support platform 2 is fixed on the base 1. A first motor 3-1, a second motor 3-2 and a third motor 3-3 are fixed. A first right-angle reducer 4-1 is connected to the first motor 3-1, a second right-angle reducer 4-2 is connected to the second motor 3-2, and a second right-angle reducer 4-2 is connected to the third motor 3-3. There is a third right-angle reducer 4-3, and a fourth right-angle reducer 4-4 is connected to the fourth motor 3-4.
[0030] Figure 8It is a schematic diagram of the constraint branch chain 21, the constraint branch chain 21 is rotatably arranged on the base, and the constraint branch chain 21 include...
Embodiment 2
[0044] The structure of embodiment 2 is the same as that of embodiment 1, the difference is that the fourth motor 3-4 realizes self-locking through methods such as brakes, that is, the fourth right-angle reducer 4-4 and the bevel pinion gear 7 lose power. Rotate again, then the large bevel gear 6 no longer rotates, and the bearing platform 8 and the base have no relative rotation, which limits the degree of freedom that the restraint branch chain 21 rotates around the Z axis; at this time, the first motor 3-1, the second Two motors 3-2 and the third motor 3-3 are driven by active branch chain 20, and this device can only realize as Figure 8 The rotation of degrees of freedom in the two directions of the X-axis and Y-axis shown, that is, the dorsiflexion / plantarflexion of the ankle joint, and the two directions of varus / valgus, can selectively perform rehabilitation training on the ankle joint.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More