

Three-translational spatial parallel robot mechanism
A robot, three-translation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low running speed of the mechanism, large inertia of the execution part, and many motion pairs, and achieve simplified trajectory planning, large working space, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
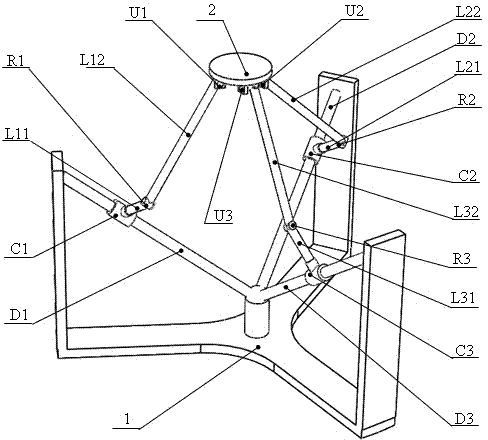
[0020] The three translational parallel mechanism provided by the present invention is composed of a fixed platform 1, a moving platform 2 and three branch chains connecting the two platforms; among them,
[0021] The first chain includes a first guide rail (D1) arranged on a fixed platform, a first cylinder pair (C1) sleeved on the first guide rail, a first connecting rod (L11) fixed on the first cylinder pair, and The second connecting rod (L12) connected by the first rotating pair (R1), the other end of the second connecting rod is connected with the moving platform through the first hook hinge (U1), and a rotation axis of the first hook hinge is connected with the first rotating pair The axis is parallel and at the same time parallel to the axis of the first guide rail;
[0022] The second branch chain includes a second guide rail (D2) arranged on the fixed platform, a second cylinder pair (C2) sleeved on the second guide rail, a third link (L21) fixed on the second cylinder pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More