

Multi-freedom-degree manipulator fixture
A technology of manipulator and degrees of freedom, applied in the direction of manipulator, program-controlled manipulator, chuck, etc., can solve the problems of complex mechanism, difficulty in adjusting workpiece clamping force, and difficulty in adapting to workpieces of various sizes, and achieves safe and convenient operation and strong versatility. , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments:
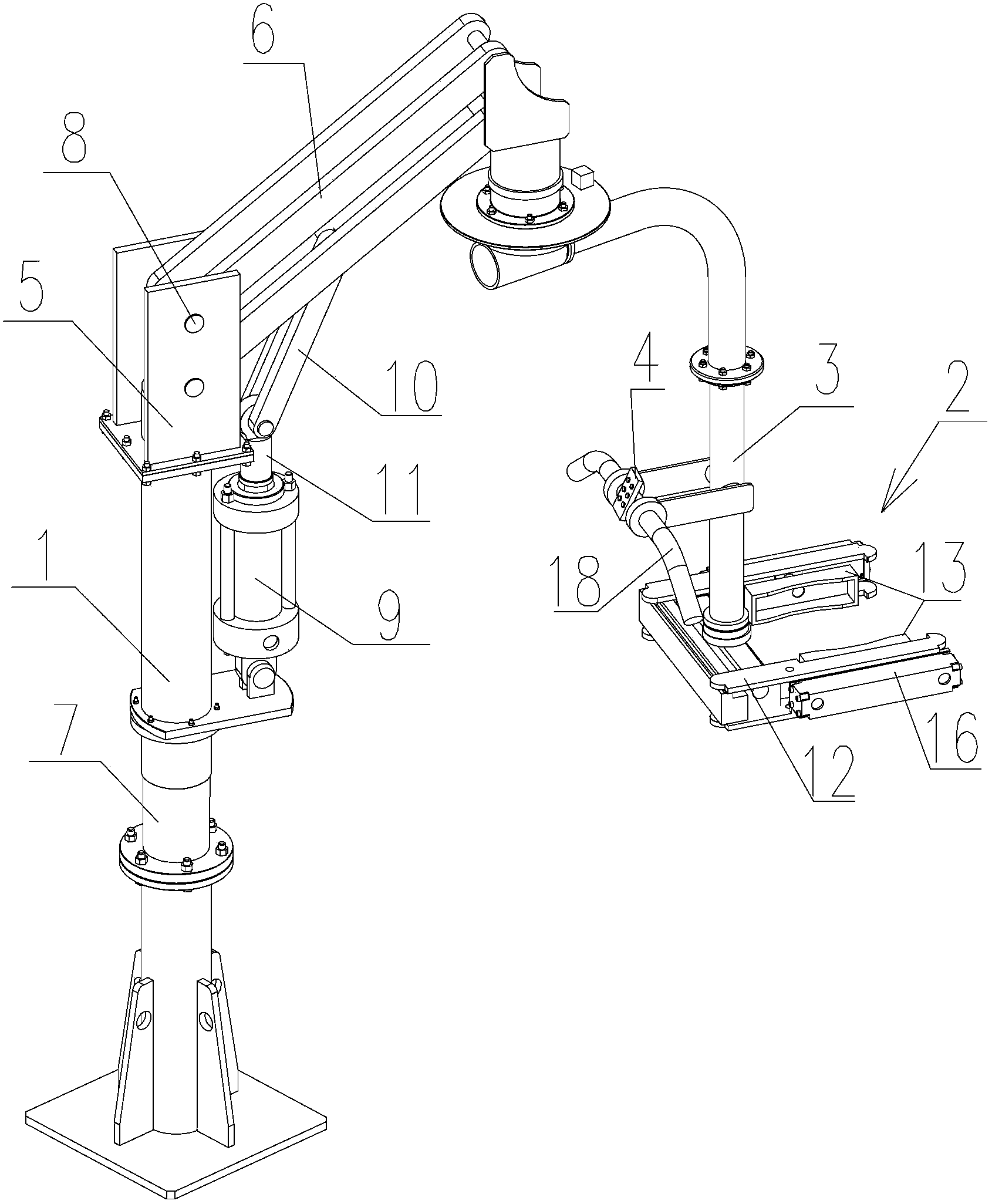
[0020] Such as figure 1 As shown, a multi-degree-of-freedom manipulator clamp includes a manipulator main body 1, a clamping mechanism 2, a connecting arm 3 for connecting the manipulator main body 1 and the clamping mechanism 2, and a controller.
[0021] Among them, such as figure 1 As shown, the manipulator mainframe 1 includes a central rotary cantilever crane 5, the cantilever crane 5 is centered on a steel column 7, the column 7 is fixed on the floor of the workshop, the cantilever 6 rotates 360 degrees around the column 7, the cantilever 6 and the column 7 The top of the cantilever is connected by a pin 8, the cantilever 6 is lifted in the vertical direction by a telescopic cylinder 9, the telescopic cylinder 9 is fixed on the column 7, the cantilever 6 is connected to the telescopic rod 11 of the telescopic cylinder 9 through the connecting rod ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More