

Polar robot based on wind-solar hybrid power supply
A wind-solar hybrid and robot technology, applied in manipulators, motor vehicles, vehicle energy storage, etc., can solve the problems of limited robot movement range and working time, insufficient passing ability, increased robot power consumption, etc., to achieve simple structure and occupy space The effect of small, extended dimensions and depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
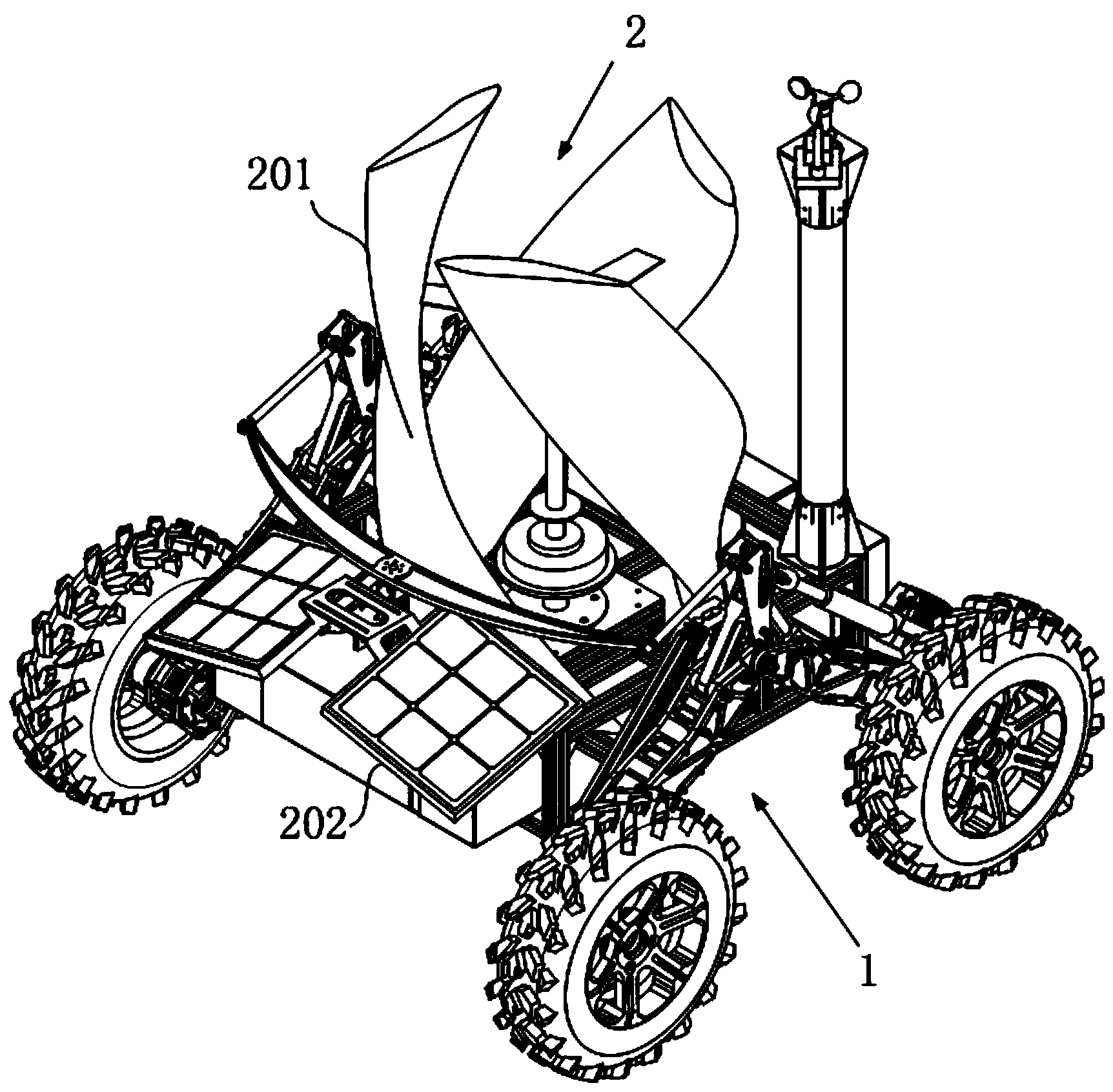
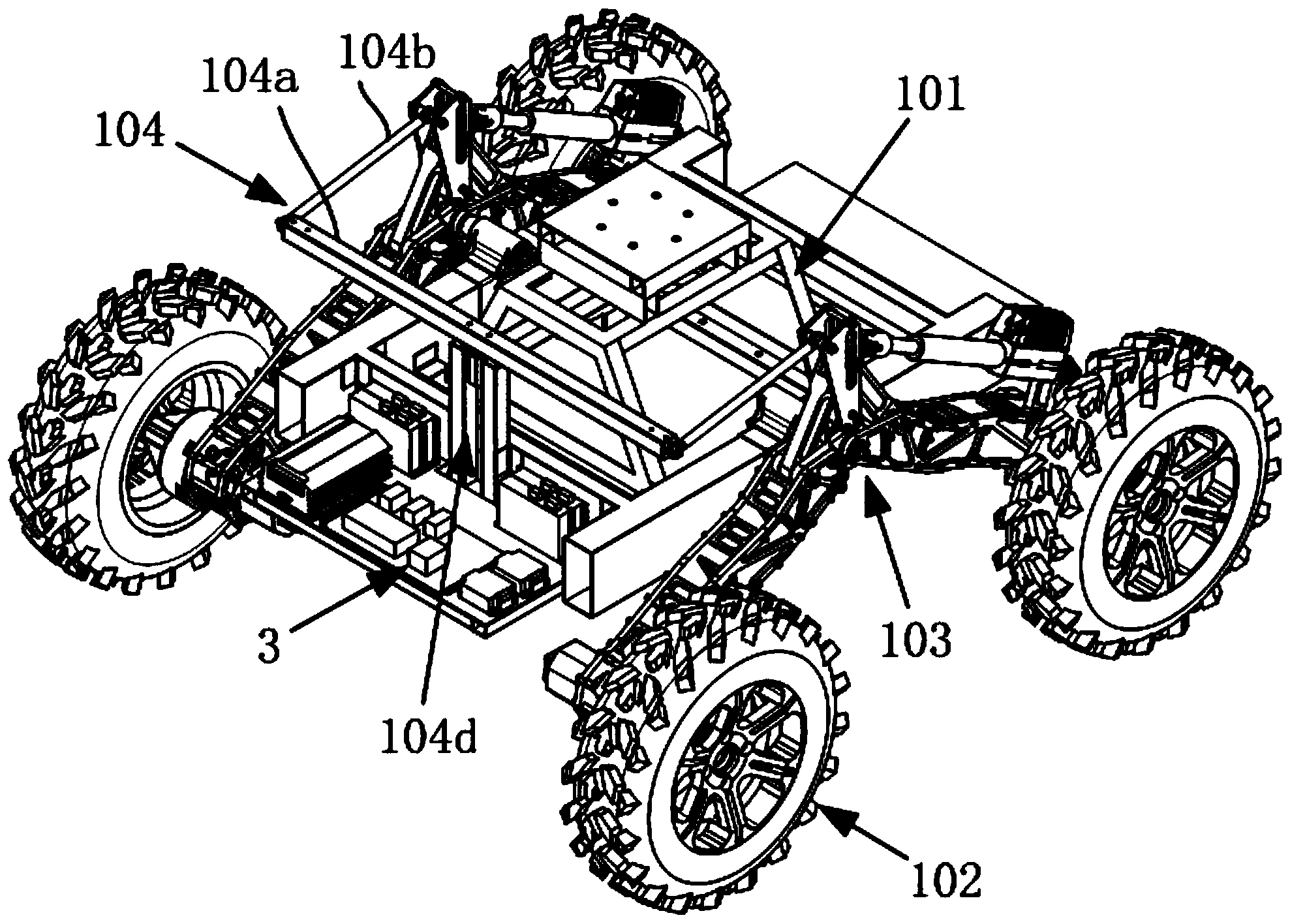
[0036] The polar robot system of the present invention includes a car body 1 and a power supply device 2 and a control system 3 loaded on the car body 1, such as figure 1 , figure 2 shown. The vehicle body 1 further includes a vehicle body 101 , wheels 102 , an active deformation suspension mechanism 103 and a driven deformation suspension mechanism 104 .
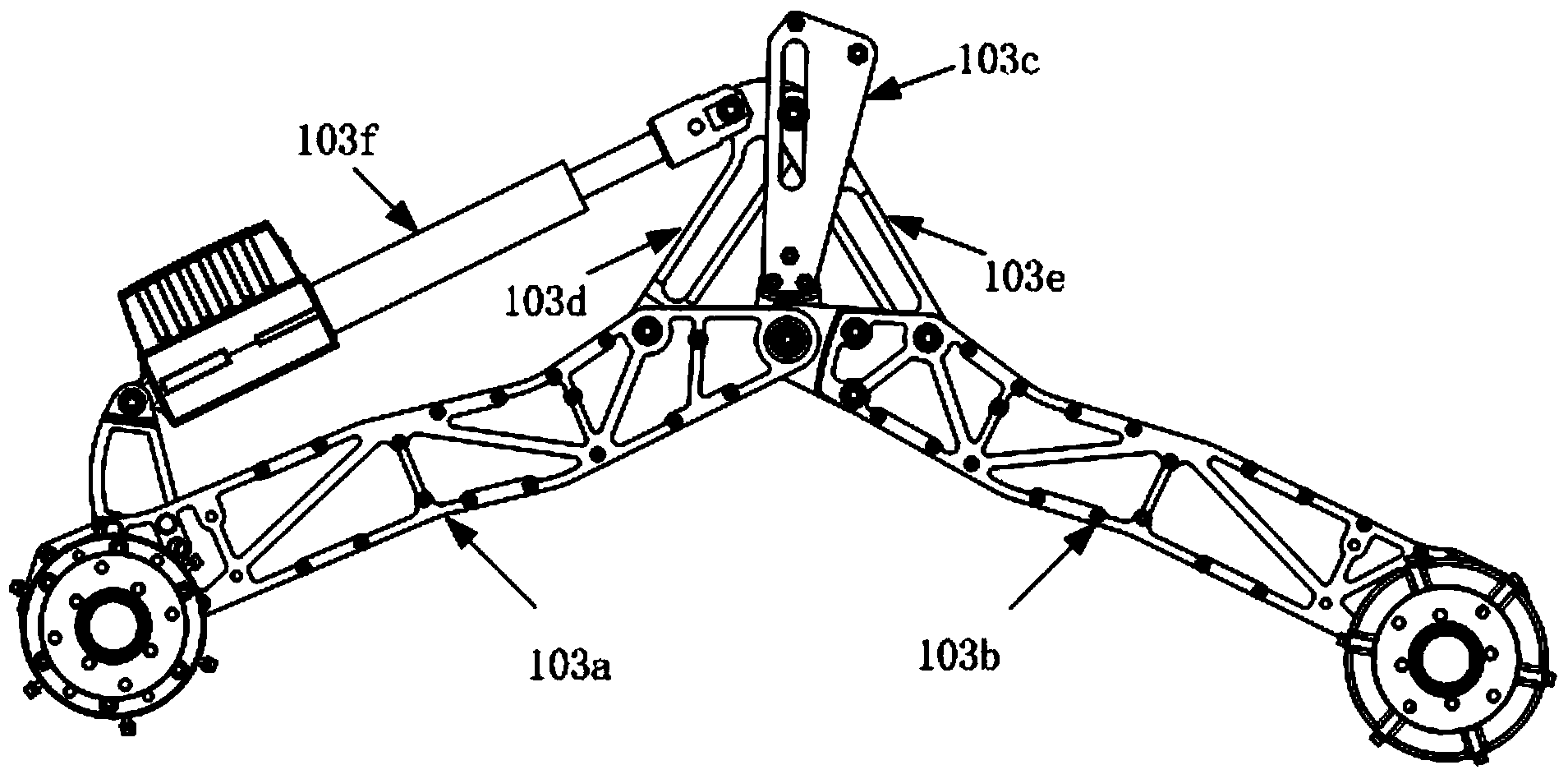
[0037] In the car body 1, there are two sets of active deformation suspension mechanisms 103 with the same structure, including beam A103a, beam B103b, longitudinal beam 103c, sliding beam A103d, sliding beam B103e and electric push rod 103f, as image 3As shown; wherein, beam A103a, beam B103b are equal in length; beam A103a, beam B103b and the hinged end of longitudinal beam 103c are hinged through the first rotating shaft. Sliding beam A103d and sliding beam B103e have the same length; the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More