

Three-freedom-degree parallel mechanism
A degree of freedom and parallel technology, applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve problems such as difficult control and calibration, complex kinematic models, etc., and achieve the effect of easy motion control, simple structure and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
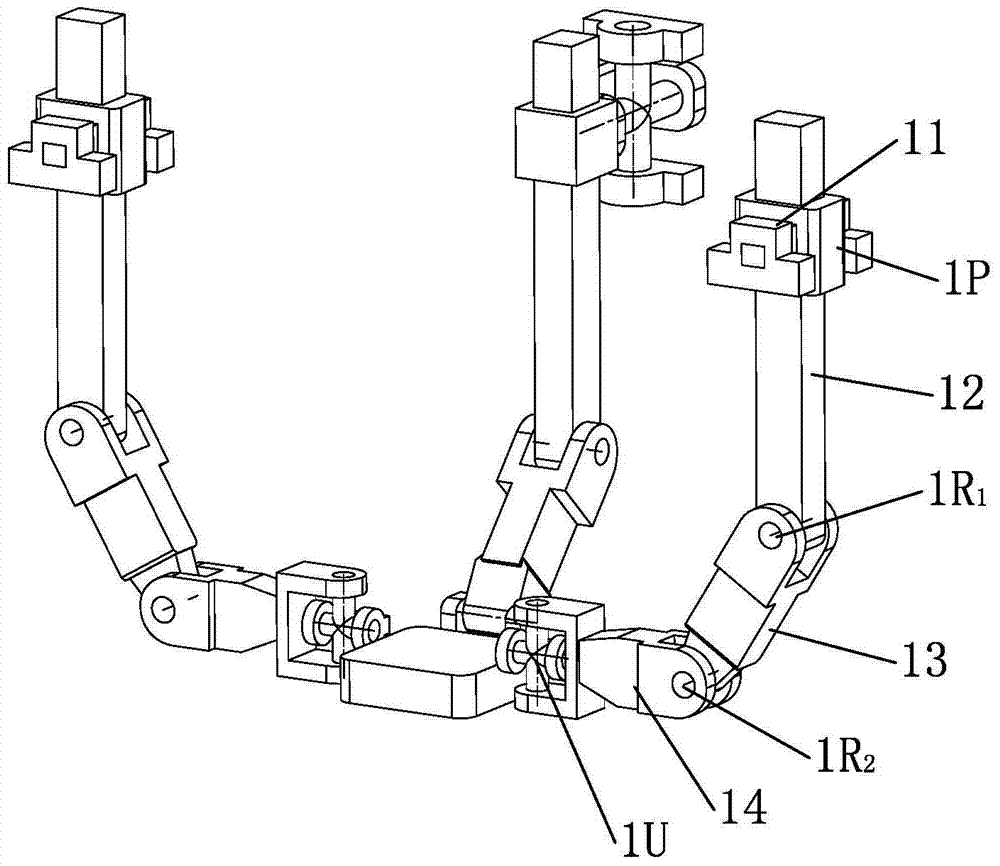
[0020] Example 1 as figure 1 As shown, this embodiment is a three-degree-of-freedom parallel mechanism, including a frame (composed of two first frames 11 and a third frame 31), a moving platform 4, and three branches connecting the frame and the moving platform . Among them, the third branch sequentially includes the universal hinge 3U, the moving pair 3P (composed of the guide rod 33 and the slider 32), the guide rod 33, the first rotating pair 3R 1 , connecting rod 34, second revolving pair 3R 2 ; The first branch and the second branch are arranged symmetrically to the moving platform, and respectively include the moving pair 1P, the guide rod 12, and the first rotating pair 1R in sequence 1 , the first connecting rod 13, the second rotating pair 1R 2 , the second connecting rod 14 and the universal hinge 1U; in the first branch: the axis of the moving pair 1P is perpendicular to the first rotating pair 1R 1 , the second revolving pair 1R 2 The axes of the two rotating...
Embodiment 2
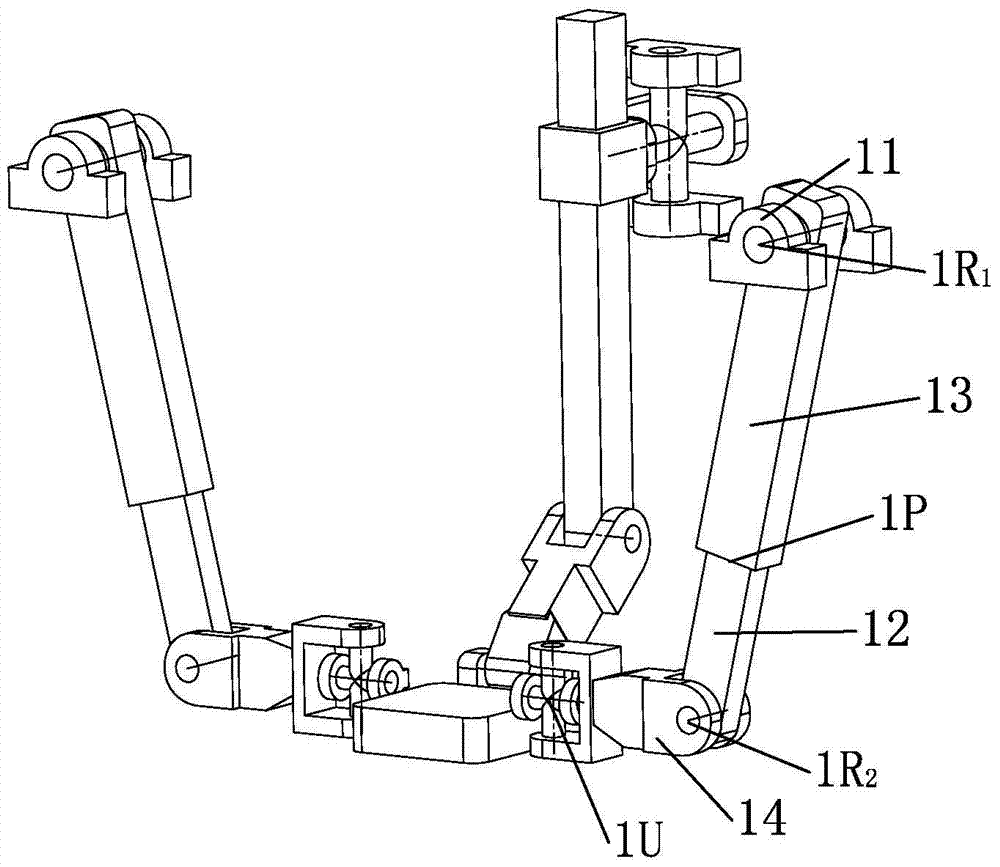
[0021] Example 2 as figure 2 As shown, this embodiment is also a three-degree-of-freedom parallel mechanism, including a frame (composed of two first frames 11 and a third frame 31), a moving platform 4, and three connecting frames and moving platforms. branch. Among them, the third branch sequentially includes the universal hinge 3U, the moving pair 3P (composed of the guide rod 33 and the slider 32), the guide rod 33, the first rotating pair 3R 1 , connecting rod 34, second revolving pair 3R 2 ; The first branch and the second branch are arranged symmetrically to the moving platform, and respectively include the first revolving pair 1R in turn 1 , moving pair 13, guide rod 1P, second rotating pair 1R 2 , connecting rod 14 and universal hinge 1U. In the first branch: the axis of the moving pair 1P is perpendicular to the first rotating pair 1R 1 , the second revolving pair 1R 2 The axes of the two rotating pairs in the universal joint 1U are always perpendicular to the...
Embodiment 3
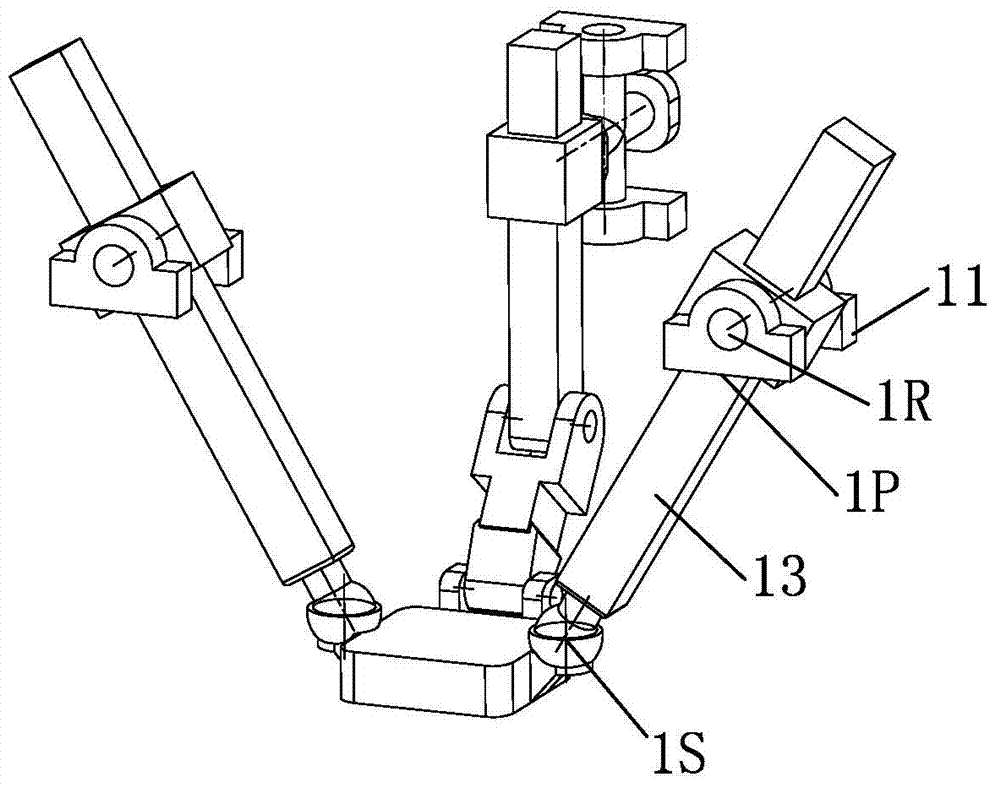
[0022] Example 3 as image 3 As shown, this embodiment is also a three-degree-of-freedom parallel mechanism, including a frame (composed of two first frames 11 and a third frame 31), a moving platform 4, and three connecting frames and moving platforms. branch. Among them, the third branch sequentially includes the universal hinge 3U, the moving pair 3P (composed of the guide rod 33 and the slider 32), the guide rod 33, the first rotating pair 3R 1 , connecting rod 34, second revolving pair 3R 2 ; The first branch and the second branch are arranged symmetrically to the moving platform, and respectively include the rotating pair 1R, the first connecting rod 13 , the moving pair 1P, the guide rod 12 and the ball joint 1S. In the first branch: the axis of the moving pair 1P is perpendicular to the axis of the rotating pair 1R, and the second branch is the same as the first branch. In the third branch: the axis of the horizontal rotary joint in the universal joint 3U and the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More