

Bevel gear differential-motion human eye movement imitating mechanism
A technology of motion mechanism and bevel gear, which is applied in the field of robotics, can solve problems such as occupation, excessive space, and large volume, and achieve the effects of ensuring integrity, light weight of the mechanism, and accurate and reliable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] A preferred embodiment of the present invention will be described in detail below in conjunction with the accompanying drawings.
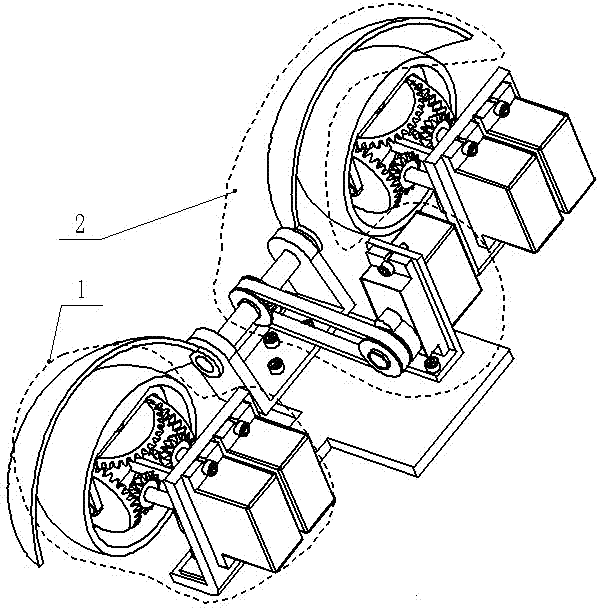
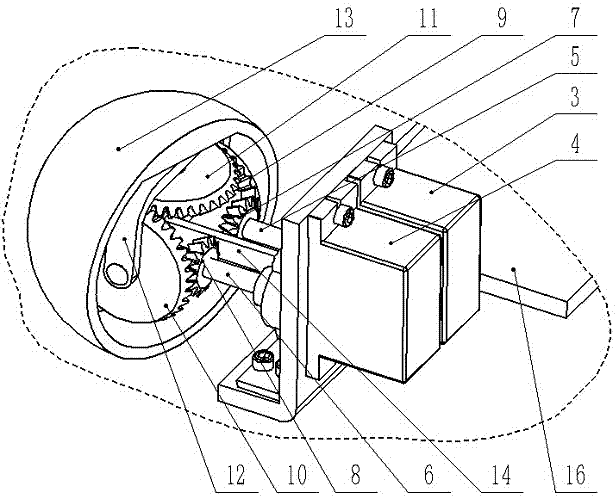
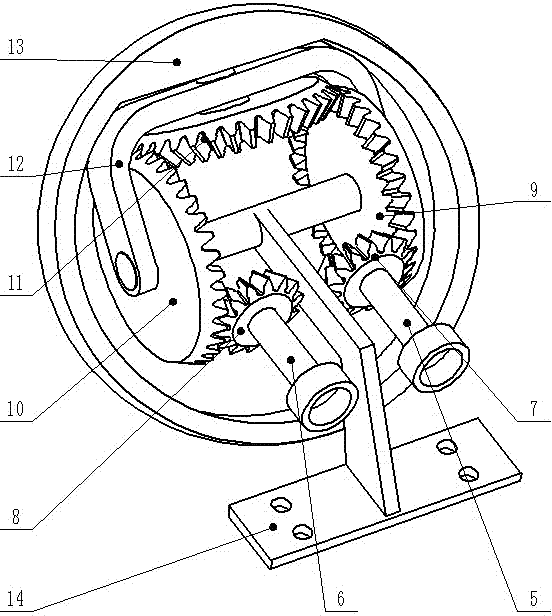
[0016] see Figure 1~Figure 6 , the bevel gear differential humanoid eye movement mechanism includes two left and right eyeball movement mechanisms 1 and an eyelid movement mechanism 2; the left and right eyeball movement mechanisms 1 are consistent and have no difference, and each includes two drive motors 3 and 4, two driving shafts 5 and 6, two driving bevel gears 7 and 8, two central bevel gears 9 and 10, a planetary bevel gear 11 with shaft ends, a tie rod 12 for supporting the planetary bevel gears , an eyeball 13, a central support frame 14 and some screws 15; the motors 3 and 4 are fixed on the base plate 16 support ends by screws 15, and the central support frame 14 is fixed on the base plate 16 by screws 15, and two drive shafts 5 and 6 are respectively fixed on the output shafts of two motors 3 and 4, and two drive bevel gears 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More