

Micro-intelligent exoskeleton finger recovery robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation medicine, can solve the problems of large size, lack of combination of upper limbs and fingers, and no portability for home rehabilitation, and achieve the effect of reducing size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] one, Composition of micro-intelligent exoskeleton finger rehabilitation robot system
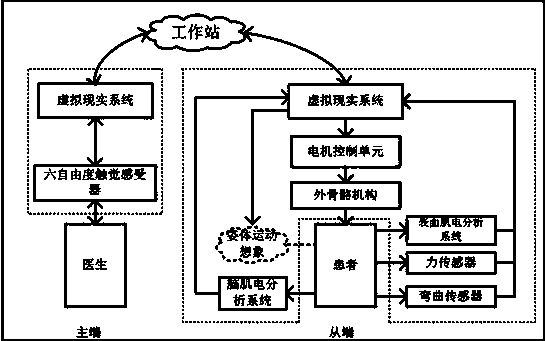
[0025] Such as figure 1 As shown, the present invention provides Exoskeleton Finger Rehabilitation Robot yes Exoskeleton Finger Rehabilitation Robot System an important component of. The exoskeleton finger rehabilitation robot system includes a system master and a system slave. The master end of the system has a master-end virtual reality system and a six-degree-of-freedom tactile sensor; the slave end of the system has a slave-end virtual reality system, a motor control unit, an exoskeleton mechanism, a surface electromyography analysis system, a force sensor, a bending sensor, and an EEG analysis system.
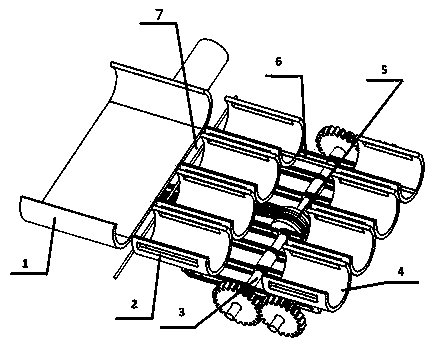
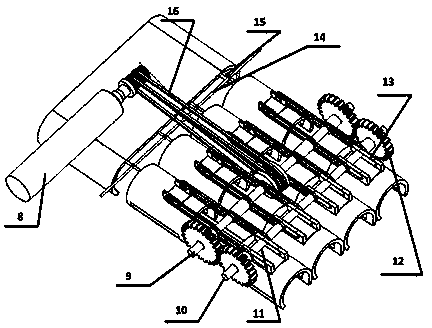
[0026] Such as figure 2 and image 3 As shown, the exoskeleton mechanism refers to the present invention Micro intelligent exoskeleton finger rehabilitation robot , including 1. Back of hand, 2. First finger joint, 3. PIP joint, 4. Second finger joint, 5. Pulley, 6. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More