

Sailing planning algorithm design based on grid failure
A track planning and grid division technology, applied in navigation calculation tools, navigation, surveying and navigation, etc., can solve the difficulties of real-time track planning, easy to fall into local search, and high computational complexity of UAV track planning, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following parts will describe the specific embodiments of the present invention in detail in conjunction with the accompanying drawings:
[0023] Step 1. Initialize
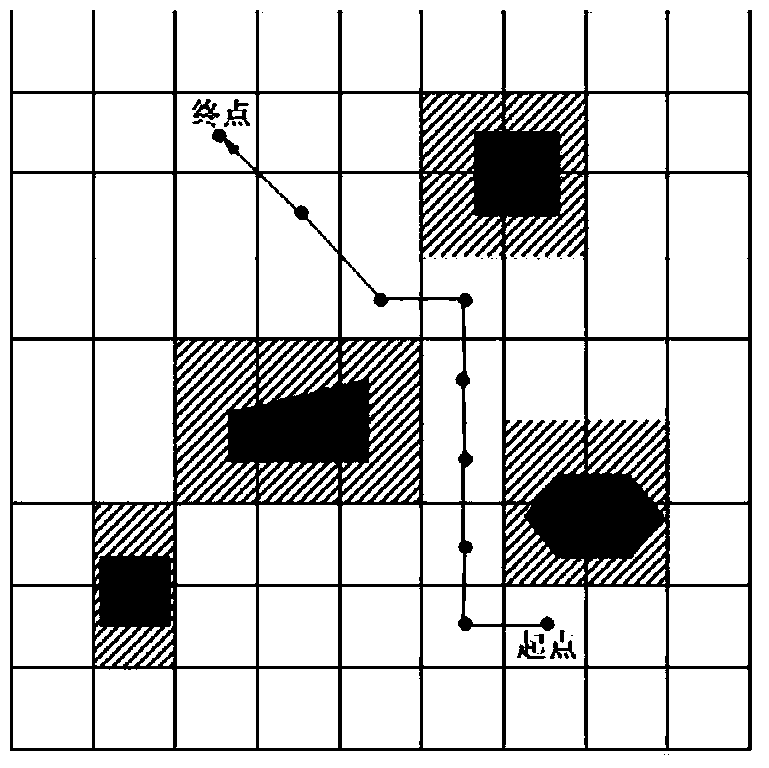
[0024] Load the map and elevation data, determine the map range corresponding to the flight area and the unit length of the division length, width and height, so as to determine the size n of the three-dimensional space to be established 1 , n 2 and n 3 . Load various radar, artillery threat data. Given departure and destination information.
[0025] Step 2. Environment Modeling
[0026] The three-dimensional space of UAV flight environment planning is expressed as geometric space area {(x,y,z)|0≤x≤n 1 ,0≤y≤n 2 ,0≤z≤n 3}. In 2D modeling, the UAV flight environment is horizontally divided into 2D n 1 ×n 2 Mesh (Mesh, denoted as M 2 ). by n 3 M 2 Stacked up according to the unit distance, and connected the corresponding nodes to form a three-dimensional n 1 ×n 2 ×n 3 grid (denoted as M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More