

Control method of gait rehabilitation training robot
A control method and rehabilitation training technology, applied in passive exercise equipment, physical therapy, etc., can solve the problem of patients' residual exercise ability, and achieve the effect of increasing the degree of active participation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is based on the specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims of the present application is not limited to the description of the following embodiments.
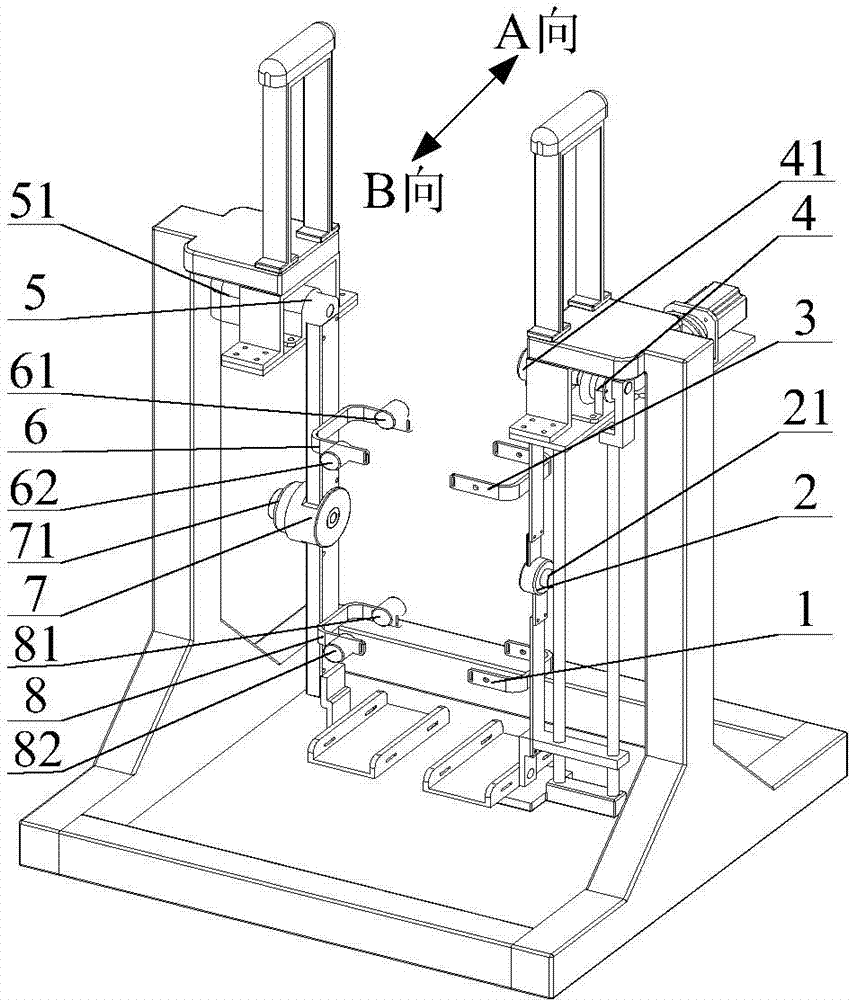
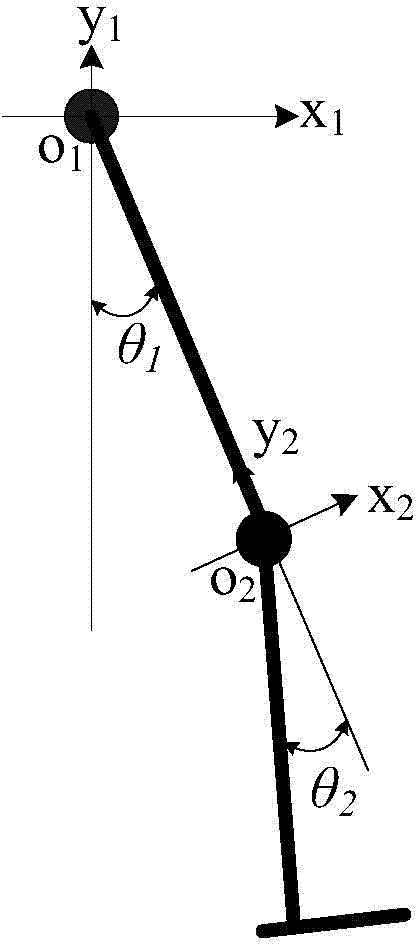
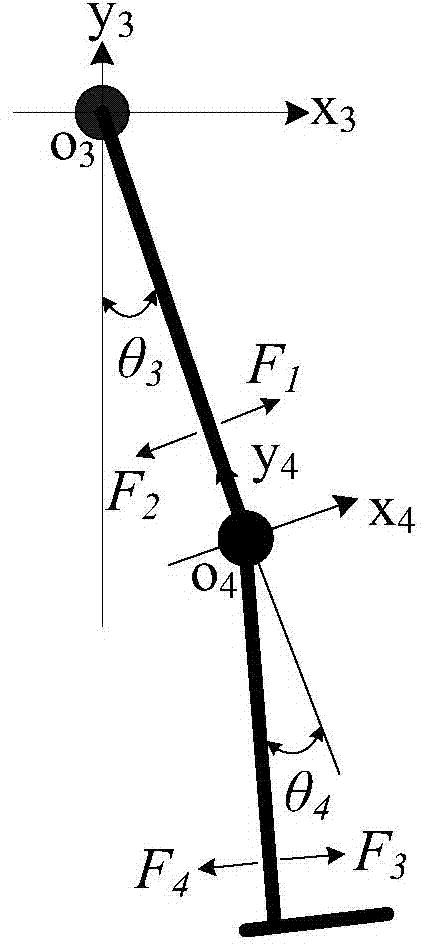
[0017] The control method (abbreviation control method of the gait rehabilitation training robot of the present invention's design, see Figure 1-4 ), the control method is to detect the gait parameters of the patient's healthy limb online in each walking cycle during rehabilitation training, and obtain the functional relationship between the angular displacement of the hip joint of the healthy limb and time, the functional relationship between the angular velocity of the hip joint and time, The functional relationship between the angular dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More