

Collecting robot implement system based on machine vision
A technology that realizes system and machine vision. It is applied to the control of finding targets and camera devices. It can solve the problems of picking manipulator interference, blurred image acquisition, and unstable conveyor belt speed. Solve the effect of speed instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
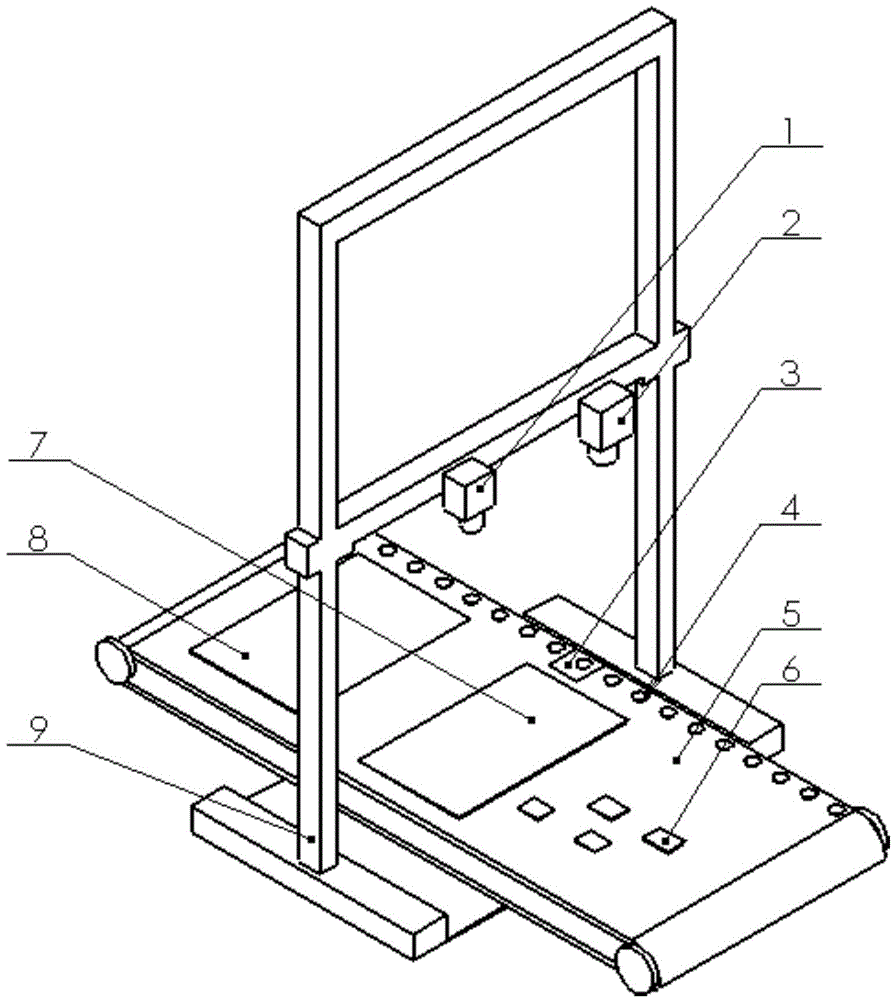
[0009] A pick-up robot implementation system based on machine vision is composed of a pick-up object detection camera 1, a speed-measuring camera 2, a speed-measuring detection area 3, a speed-measuring mark 4, a conveyor belt 5, a picked-up object 6, a picked-up object detection area 7, and a manipulator pick-up area 8 , a pedestal 9, a manipulator, and a computer; it is characterized in that: the recognition area of the speed measurement camera 2 is the speed measurement monitoring area 3 directly below it, the speed measurement mark 4 is fixed on the conveyor belt 5, and the distance between two adjacent speed measurement marks 4 Equal to the length of the speed monitoring area 3 is 50mm, the recognition area of the picked object detection camera 1 is the picked object detection area 7 directly below it, the picking area of the manipulator is the manipulator picking area 8 directly below it, the speed measuring camera 2 and the pick up area The object detection camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More